Roboter-Arme und -Greifer
In der hiesigen Galerie Roboter-Arme und -Greifer gibt es insgesamt 13 Bilder. Das sind die ersten 4 Einträge:

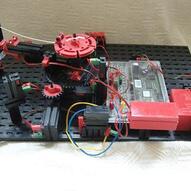
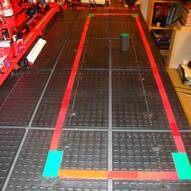
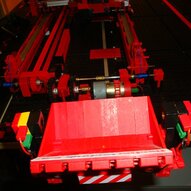
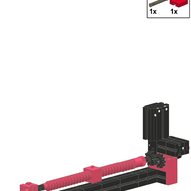
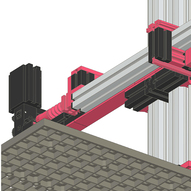
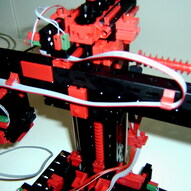
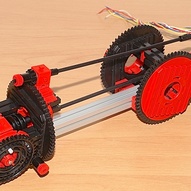
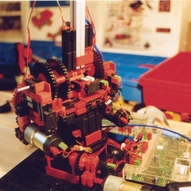
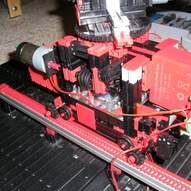
3-achs Roboter mit Förderband (Janft)
3-achs Roboter mit Förderband (Janft)23
Der Roboter ist aus dem Set “Industry Robots” das Förderband ist Marke Eigenbau. Programmiert wird das Ganze Mit dem TeachIn des 3-achs Roboters.
… und außerdem noch 19 weitere Bilder.
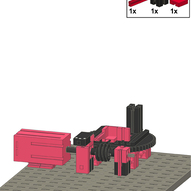
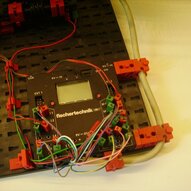
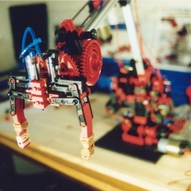
3-Achs-Greifer
3-Achs-Greifer8


… und außerdem noch 4 weitere Bilder.
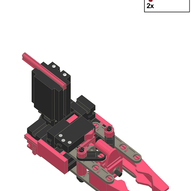
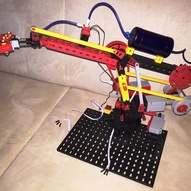
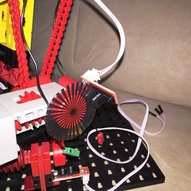
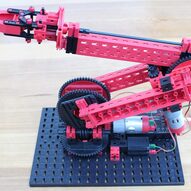
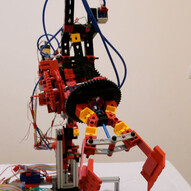
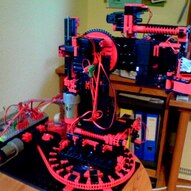
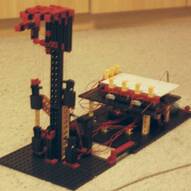
4-Achs-Roboter (Severin)
4-Achs-Roboter (Severin)9
Bilder von meinem Jugendforschtprojekt 2009. Es ging darum einen Roboter über Potentiometer zu positionieren, Ziel war es die vordere Ablagefläche Parallel zum Boden zu halten.



… und außerdem noch 5 weitere Bilder.
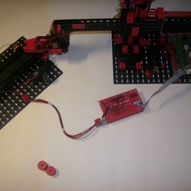
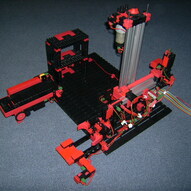
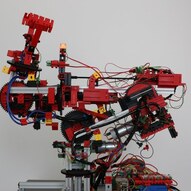
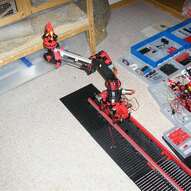
5-Achs Roboter (david-ftc)
5-Achs Roboter (david-ftc)4
Dies ist mein erster Roboter, den drei drehbaren Achsen basiert: A, B und C. Diese Achsen erlauben der Maschine, eine sehr große Anzahl an Positionen anzufahren. Um den Roboter noch flexiebler zu machen, lässt sich der gesamte Aufbau drehen und horizontal um etwa 30 cm bewegen.




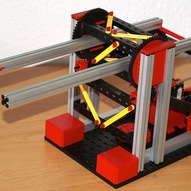
5-Achs Roboter Prototyp (werner)
5-Achs Roboter Prototyp (werner)8




… und außerdem noch 4 weitere Bilder.
5-Achs-Knickarmroboter
5-Achs-Knickarmroboter24


… und außerdem noch 20 weitere Bilder.
5-Achsen Roboterarm (hufi)
5-Achsen Roboterarm (hufi)40


… und außerdem noch 36 weitere Bilder.
6-Achs-Roboter (Severin)
6-Achs-Roboter (Severin)47




… und außerdem noch 43 weitere Bilder.
6-Achs-Roboter 2 (Severin)
6-Achs-Roboter 2 (Severin)8
Ein neuer Versuch von mir einen 6-Achser zu Bauen. Diesmal wird mehr auf Gewicht und vor allem auf Stabilität geachtet. Das Hauptziel ist einen schnellen, leichten und robusten Roboter zu bauen.




… und außerdem noch 4 weitere Bilder.
6-achsiger Roboterarm (manuMFfilms)
6-achsiger Roboterarm (manuMFfilms)1 1
Dies ist mein 6-achsiger Roboterarm
16

2
6-Achsroboter (RoboMaster)
6-Achsroboter (RoboMaster)13
Roboterarm mit sechs Freiheitsgeraden, der mit einer Poteniometereinheit ferngesteuert werden kann.




… und außerdem noch 9 weitere Bilder.
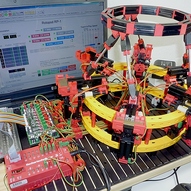
7-Achs-Roboterarm + Greifer, gesteuert via Webcam
7-Achs-Roboterarm + Greifer, gesteuert via Webcam17
Mein neues Großprojekt ist nun fast fertig. Deshalb stelle ich jetzt einige Bilder in die Community, aber selbstverständlich könnt ihr den Roboter am 25.September auf der Convention live sehn… Dort sind dann sicher auch vielmehr Details zu erkennen, als auf diesen paar Fotos…

… und außerdem noch 13 weitere Bilder.
Auf vier Achsen modifizierter Trainingsroboter
Auf vier Achsen modifizierter Trainingsroboter10
… 30572 aus dem Baukasten 36069 Profi Computing von 1991
Als ersten Industrieroboter habe ich den 30572 aus dem Baukasten 36069 Profi Computing von 1991 nachgebaut. Da ich so mit dem Modell nicht zufrieden war, habe ich ein paar Modifikationen vorgenommen:
- Pneumatik-Greifer statt …


… und außerdem noch 6 weitere Bilder.
CD-Wechsler
CD-Wechsler10


… und außerdem noch 6 weitere Bilder.
Delta-Roboter
Delta-Roboter12
Leistungsfähige Parallelkinematik




… und außerdem noch 8 weitere Bilder.
fischertechnik 6-Achsen Roboterarm RS 816
fischertechnik 6-Achsen Roboterarm RS 81655
Hallo Technikfreunde,
hiermit möchte ich euch meinen 6-Achsen Roboterarm RS 816 vorstellen.
Ziel war es einen technisch voll funktionsfähigen Roboterarm zu konstruieren, welcher den orignalen Roboterarm in Aussehen und Funktionen in nichts nachsteht. Es wurde dabei Wert auf Stabilität der Arme, …




… und außerdem noch 51 weitere Bilder.
Flexpicker
Flexpicker3



FT Balgijper
FT Balgijper4
FT und LDraw
FT und LDraw6
Ausschnitte aus mit LDraw u.a. erstellten Anleitung
… und außerdem noch 2 weitere Bilder.
Greifroboter
Greifroboter9




… und außerdem noch 5 weitere Bilder.
Industry Robot (ekneubuehl)
Industry Robot (ekneubuehl)9

… und außerdem noch 5 weitere Bilder.
Knickarm-Roboter (ohne Alus)
Knickarm-Roboter (ohne Alus)7
Ein Roboterarm mit drei Freiheitsgraden - ohne Alus, ohne Modding.



… und außerdem noch 3 weitere Bilder.
Lagerroboter (Olli)
Lagerroboter (Olli)19
Roboter zum Ein- und Auslagern von Tonnen.



… und außerdem noch 15 weitere Bilder.
pneumatischer Schwenkgreifer
pneumatischer Schwenkgreifer8




… und außerdem noch 4 weitere Bilder.
Präzisions-Industrieroboter
Präzisions-Industrieroboter14
Bei diesem Projekt soll ein Handhabungsroboter herauskommen, der seine Positionen sicher und exakt erreicht. Dafür wird ein eigenes, fischertechnik-taugliches Konzept entwickelt.


… und außerdem noch 10 weitere Bilder.
Rob 4 aus dem alten Industry Robots Set
Rob 4 aus dem alten Industry Robots Set10
Ich habe mal den Rob 4 aus dem alten Industry Robots Set nachgebaut. Ich habe micht soweit es ginge an die original Anleitung gehalten. An den Stellen, wo ich mit meinen Teilen nicht weiter kam habe ich ein wenig Improvisiert (wenn ich das so sagen darf?).



… und außerdem noch 6 weitere Bilder.
Robot 2005
Robot 200527




… und außerdem noch 23 weitere Bilder.
Robot arm with 6 degrees of freedom (bummtschick)
Robot arm with 6 degrees of freedom (bummtschick)3
Photos of my model of a robot arm with six degrees of freedom, controlled by an Arduino Mega 2560. Much more to come soon, these are outdated and a few months old.
4
42
18

Roboterarm (Heiko)
Roboterarm (Heiko)27
Ein Roboterarm mit sechs Freiheitsgraden. Projekt für Jugend forscht.


… und außerdem noch 23 weitere Bilder.
Roboterarm (StefanL)
Roboterarm (StefanL)3
12

13
19

Roboterarm auf Schiene
Roboterarm auf Schiene12


… und außerdem noch 8 weitere Bilder.
Roboterhände
Roboterhände14


… und außerdem noch 10 weitere Bilder.
Robotersteuerung mit Joystick
Robotersteuerung mit Joystick6
Steuerung eines Roboters mit einem Joystick




… und außerdem noch 2 weitere Bilder.
Rotopod-Roboter
Rotopod-Roboter1
Modelle der technischen Realität eines universellen Maschinenarbeitstisches in Gegenwart und Zukunft?
7
Samurai Roboter
Samurai Roboter6
… und außerdem noch 2 weitere Bilder.
Saugnapfroboter
Saugnapfroboter7
Saugnapfroboter mit Saugnapf



… und außerdem noch 3 weitere Bilder.
Tripod-Roboter
Tripod-Roboter3
Drei Achsen frei im Raum beweglich. Dafür keine Rotationen.


