Lauf-, Fahr- und Kletterroboter
In der hiesigen Galerie Lauf-, Fahr- und Kletterroboter gibt es insgesamt 7 Bilder. Das sind die ersten 4 Einträge:



'Blinder'Roboter
'Blinder'Roboter19
Ein Roboter der sich orientieren soll wie ein Blinder.




… und außerdem noch 15 weitere Bilder.
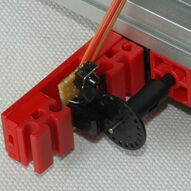
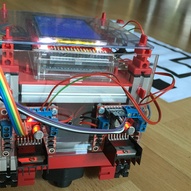
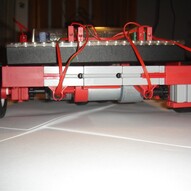
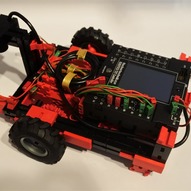
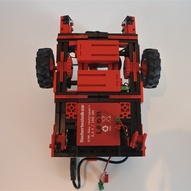
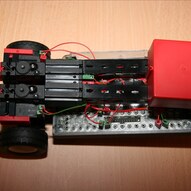
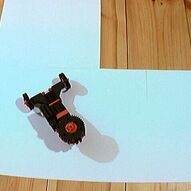
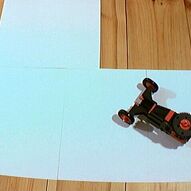
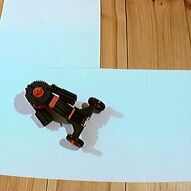
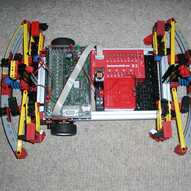
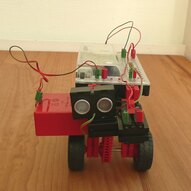
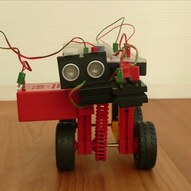
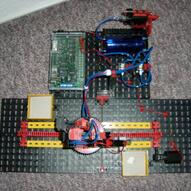
Arduino Uno Autonomer Roboter aus fischtechnik mit Pixy Kamera
Arduino Uno Autonomer Roboter aus fischtechnik mit Pixy Kamera2
Ein autonomer fischertechnik Roboter mit Pixy Kamera und Objekterkennung ft Modell BBC Roboter bzw CVK “Schildkröte” 67068 von 1991


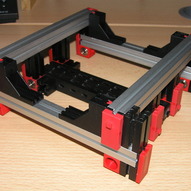
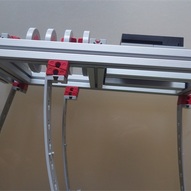
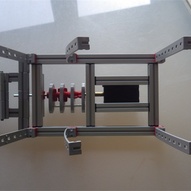
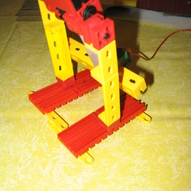
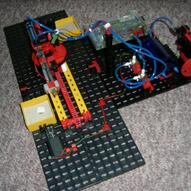
Ausleger
Ausleger5



… und außerdem noch 1 weiteres Bild.
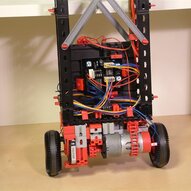
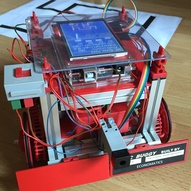
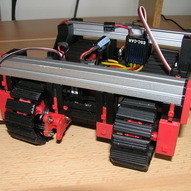
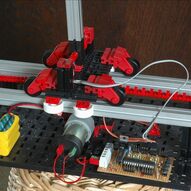
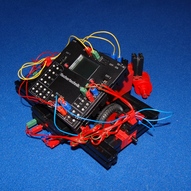
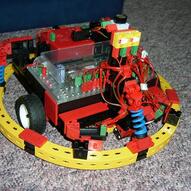
Balancing Robot
Balancing Robot10
Using the TX Controller and some I2C sensors you can build a balacing robot. Some Arduino-based models have been shown, but this one consist entirely out of fischertechnik parts, apart from the sensor.
It uses a gyro (to measure rotation, or the speed of falling) and an accelerometer (to determine …


… und außerdem noch 6 weitere Bilder.
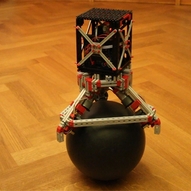
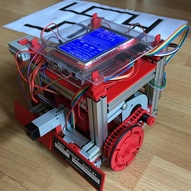
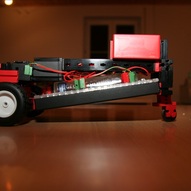
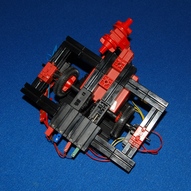
Ball Balancing Robot
Ball Balancing Robot20
I’ve built a balancing robot on two wheels before (http://ftcommunity.de/categories.php?cat_id=2741), and announced I was working on one that could balance on a ball (http://ftcommunity.de/details.php?image_id=36900). That turned out to be a whole lot more difficult. Finally, I managed to …


… und außerdem noch 16 weitere Bilder.
BBC Buggy
BBC Buggy13
Hier seht Ihr eine leicht modifizierte Replik des orginalen Fischertechnik BBC Buggies der Firma Economatics von 1983. Das Modell ist in Kooperation von “allsystemgmbh” und “uffi” entstanden auf Anregung von Dirk Fox.
Die Steuerung besteht aus einem
- Arduino Mega Board mit …
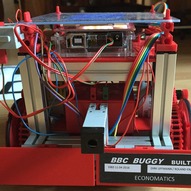
… und außerdem noch 9 weitere Bilder.
Big Boy Zweibeiniger Laufroboter
Big Boy Zweibeiniger Laufroboter14
Laufroboter




… und außerdem noch 10 weitere Bilder.
Classicstile Roboter
Classicstile Roboter7
Dass ist der Basicroboter aus dem Robo Mobile Set in grau, nur die Taster sind schwarz.



… und außerdem noch 3 weitere Bilder.
Defiants MR 2009
Defiants MR 200910
… und außerdem noch 6 weitere Bilder.
Einrad-Roboter
Einrad-Roboter4
5

12

5

18

Erkundungsroboter
Erkundungsroboter1 1
Ein einfaches Modell zum Fahren, Erkunden und “aufräumen”.
12
3

Evolution eines Humanoid, Biped Roboter
Evolution eines Humanoid, Biped Roboter10
Bau eines humanoiden Roboters; mit dem Ziel, ihn zum Laufen zu bringen
… und außerdem noch 6 weitere Bilder.
Experimentelle Antriebe
Experimentelle Antriebe3
Antriebe die von traditionellen ft-Antrieben abweichen
5
5

4
Explorer (StefanL)
Explorer (StefanL)2
12
9
Explorer mit Gleichlaufgetriebe
Explorer mit Gleichlaufgetriebe7



… und außerdem noch 3 weitere Bilder.
Fahrroboter von Olagino
Fahrroboter von Olagino5
Der gezeigte Roboter wurde für eine Präsentation in der Schule gebaut und programmiert - wobei der Fokus auf der Programmierung lag. Das Fahrwerk basiert dabei teilweise aus dem Fischertechnik TXT Discovery Set. Der Roboter in Aktion und die dazugehörigen Programme sind unter …


… und außerdem noch 1 weiteres Bild.
Fischertechnik-Ultraschall-Antianstoß-Roboter
Fischertechnik-Ultraschall-Antianstoß-Roboter6
Mein erster Roboter der Sene umgebung durch Ulrtaschall erfasst um nicht gegen Wande zu fahren! (Ultraschallsensor von Conrad)




… und außerdem noch 2 weitere Bilder.
Fishbug - Der große Bruder
Fishbug - Der große Bruder5
Inspieriert durch lemkajen´s Bauten habe ich mir gedacht: Jetzt muss auch ein echter Fischer-Bug her :)
Die jetztige Konstruktion “geht erst richtig ab”, wenn sie mit 16V “befeuert” wird. Damit der Motor aber nicht “abraucht” wird also die Konstruktion noch …

… und außerdem noch 1 weiteres Bild.
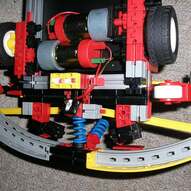
Heavy-Duty Explorer mit Kugellager und Alus
Heavy-Duty Explorer mit Kugellager und Alus7
Prototype eines Heavy-duty Explorer mit Kugellager und Alus




… und außerdem noch 3 weitere Bilder.
Invertiertes Pendel
Invertiertes Pendel3

Kleiner Transportbot
Kleiner Transportbot7
Dieses kleine Biest ist dafür gedacht, kleine Paletten gezielt durch die Gegend zu fahren. Zwei Räder werden getrennt angetrieben, ein Stützrad läuft nach. Dadurch ist Drehen auf der Stelle möglich. Akkupack und Interface sind mit an Bord.


… und außerdem noch 3 weitere Bilder.
Kleiner TX Roboter
Kleiner TX Roboter3

Käfer
Käfer1
Die Vibrationen bewirken die Bewegung
Labyrinthroboter
Labyrinthroboter28
Maschinen zum Durchqueren von Lothars Labyrinth.

… und außerdem noch 24 weitere Bilder.
Labyrinthroboter 2. Generation
Labyrinthroboter 2. Generation13
Es geht einfacher



… und außerdem noch 9 weitere Bilder.
Labyrinthroboter 3. Generation
Labyrinthroboter 3. Generation15
Es geht auch kleiner



… und außerdem noch 11 weitere Bilder.
Laufmaschinen von Ralf Geerken
Laufmaschinen von Ralf Geerken6
Hier werden kleine Laufmaschinen in unterschiedlichen Bauformen vorgestellt.




… und außerdem noch 2 weitere Bilder.
Licht-und Spursucher mit Hindernis-und Kantenerkennung
Licht-und Spursucher mit Hindernis-und Kantenerkennung4


Maker 4wd Rasenmäher
Maker 4wd Rasenmäher8
Maker Kit 4wd als Rasenmäher
- Ansteuerung der Motoren erfolgt mittels TLE5205 H-Brücke, die Geschwindigkeit der vier Motoren wird durch je einen PID-Controller gesteuert.
- Durch die auf etwa einen Zentimeter genaue Positionsbestimmung des RTK-GPS-Modul Zed-F9P wird kein Begrenzungskabel benötigt. …




… und außerdem noch 4 weitere Bilder.
Mini Laufroboter
Mini Laufroboter10
Zweibeiniger Mini - Laufroboter Funktionsweise ist wie eine Aufziehspielzeug nur halt mit einem ft - Minimot. Der Roboter läuft etwas im Kreis. Ab und an verhackt er sich an den Streben. Statt der Streben kann man auch die langen 90er + 15er Verbinder nehmen und den 15er etwas raus schauen lassen. …


… und außerdem noch 6 weitere Bilder.
Mobiler Roboter
Mobiler Roboter11
Panzer würde wohl eher passen….




… und außerdem noch 7 weitere Bilder.
Mobiler Roboter mit Gleichlaufgetriebe
Mobiler Roboter mit Gleichlaufgetriebe7
Ein mobiler Roboter mit Gleichlaufgetriebe. Eine Verbesserung des Basismodells vom Robo Mobile Set.


… und außerdem noch 3 weitere Bilder.
Mobiler Roboter mit Gleichlaufgetriebe (uffi)
Mobiler Roboter mit Gleichlaufgetriebe (uffi)7
Gleichlaufgetriebe mit den alten grauen M-Motoren und den alten roten Differential-Getrieben als Fahrgestell für einen mobilen Roboter. Die Übersetzung ist allerdings grenzwertig groß, er ist sehr schnell. Damit die Motoren gut anlaufen, braucht man eine Spannung > 8V. Ich habs mit …


… und außerdem noch 3 weitere Bilder.
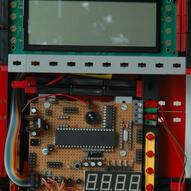
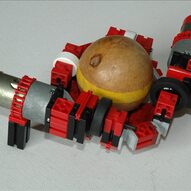
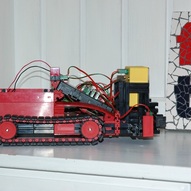
Mobiler Roboter mit Kamera OV7670 und Pneumatik-Greifer
Mobiler Roboter mit Kamera OV7670 und Pneumatik-Greifer10
Mobiler Roboter mit Kettenfahrwerk und Kamera sucht, erkennt und greift eine mit einem roten Streifen markierte Tonne mit seinem Pneumatik-Greifer.
Video dazu gibt es hier:
https://www.youtube.com/watch?v=vDrwGIaLlIo
Auf dem Farbdisplay wird oben das originale Farbbild der Kamera dargestellt …
… und außerdem noch 6 weitere Bilder.
Nicht an die Wand fahrendes Auto
Nicht an die Wand fahrendes Auto7
Das ist ein Auto, das nicht an die Wand fährt. Wenn es kurz davor ist geht der Summer an und das Auto fährt zwei Sekunden lang Rückwärts.

… und außerdem noch 3 weitere Bilder.
Robbi
Robbi3



RoboMax
RoboMax23
Roboter von Thomas Brestrich



… und außerdem noch 19 weitere Bilder.
RoboRama Robot
RoboRama Robot10
Robbie wurde gebildet, um am RoboRama Wettbewerb teilzunehmen


… und außerdem noch 6 weitere Bilder.
Roboter Fahrwerk mit Mecanum-Rädern
Roboter Fahrwerk mit Mecanum-Rädern5



… und außerdem noch 1 weiteres Bild.
Roboter mit Lineareinheit (mari)
Roboter mit Lineareinheit (mari)6

… und außerdem noch 2 weitere Bilder.
Rundumkantenerkenner + Spurensucher + Lichtsucher
Rundumkantenerkenner + Spurensucher + Lichtsucher5



… und außerdem noch 1 weiteres Bild.
Spurverfolger mit Gleichlaufgetriebe
Spurverfolger mit Gleichlaufgetriebe8
Ein Fahrroboter mit Gleichlaufgetriebe benötigt keine Schritt- oder Encodermotoren für eine saubere Geradeausfahrt und kann punktgenau auf der Stelle drehen.




… und außerdem noch 4 weitere Bilder.
Star Wars
Star Wars2
Dieses Projekt ist ungefähr 104 cm hoch und 63 cm breit. Die Bauzeit betrug ca. 4-5 Stunden. Es stellt den kleinen Roboter R2D2 aus Star-Wars dar.


superflacher Roboter (t-bear)
superflacher Roboter (t-bear)6
Nachdem ich mein letztes modell auseinander gebaut hatte habe ich uberlegt was ich als nechstes bauen sollte, und weil mein letztes so klein wie möglich war habe ich mich daführ entschieden jetzt so flach wie möglich zu bauen. Das resultat ist ein roboter der nur etwa 8cm hoch ist (Inkludiert …



… und außerdem noch 2 weitere Bilder.
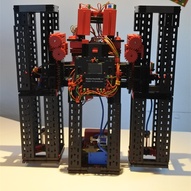
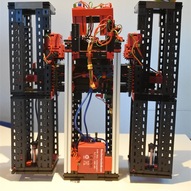
TARS - Laufroboter
TARS - Laufroboter10
Inspiriert durch die Roboter im Film Interstellar von Christopher Nolan versuchte ich einen Laufroboter zu bauen. Im Gegensatz zum Original hat mein Modell lediglich drei Beine und läuft nicht direkt, sondern bewegt sich durch ständiges “sich aus dem Gleichgewicht bringen” fort. Video …
… und außerdem noch 6 weitere Bilder.
Wii Fernbedienung gesteuerter Roboter
Wii Fernbedienung gesteuerter Roboter2


Zweirad-Roboter
Zweirad-Roboter4