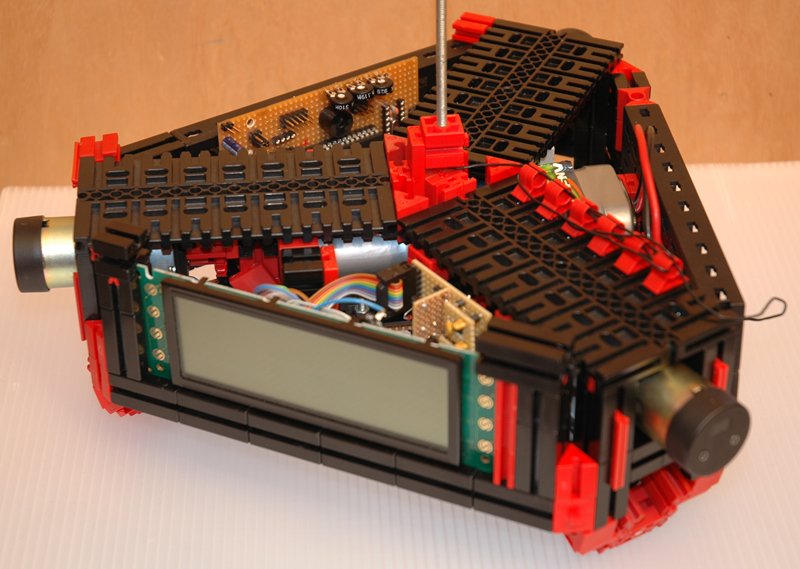
Gesamtansicht
Hochgeladen am 10.12.2008, 16:45 von kehrblech. 1 / 18
Der Roboter soll auf einer Kugel(Durchmesser ca. 70cm) balancieren, indem er auf ihr herumfährt. Dazu muss er sofort in jede Richtung fahren können, ohne sich erst drehen zu müssen. Deshalb fährt der Roboter mit Allseitenrädern.
Udo2 (10.12.2008, 17:58:37)
@kehrblech Hallo Jan, ganz tolles Modell. Wenn ich mit ft aus den Kinderschuhen raus bin, versuche ich mich mit vergleichbaren Ideen auch mal. Vielleicht bin ich dann aber schon 80 und du könntest dann der Elektronikassistent sein. :o) Gruß, Udo2
MisterWho (11.12.2008, 11:24:18)
Sieht sehr gut aus! Wie sieht denn die Kugel dazu aus? Auf das 1. Video bin ich schon gespannt :-)
kehrblech (11.12.2008, 15:08:36)
Die Kugel ist ein Gymnastikball. Mit dem Video wirds wohl noch etwas dauern, er muss erstmal balancieren lernen.