Kugelroboter - unten
Hochgeladen am 23.7.2009, 18:00 von kehrblech. 16 / 18
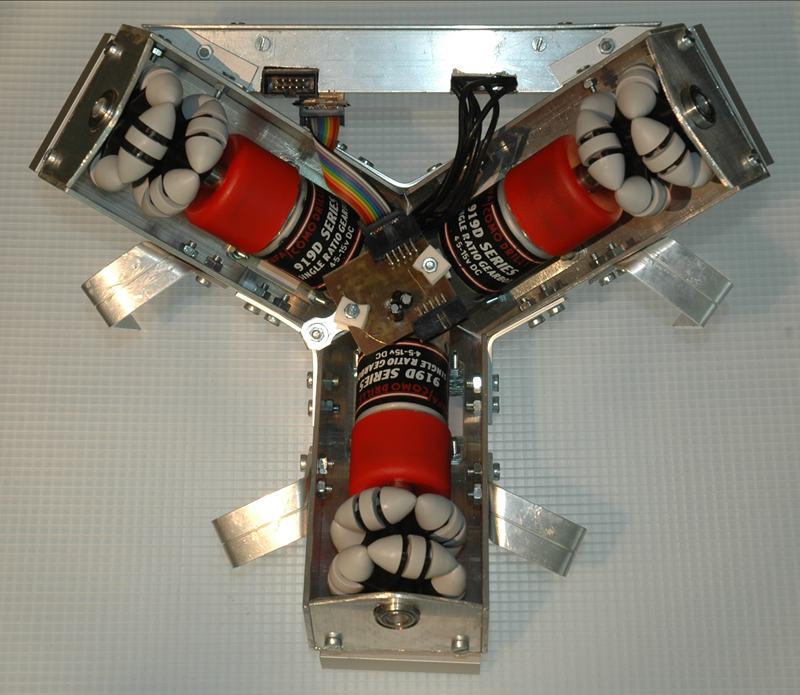
Die Motoren sind sehr kräftig und haben keine Probleme, den Roboter, der ca. 2kg wiegt, zu bewegen. In der Mitte erkennt man die Sensorplatine. Die Elektronik besteht aus insgesamt 5 Platinen: Sensorplatine, Hauptplatine, 3*Motortreiber. Auf der Hauptplatine befindet sich ein Mega32, auf den anderen jeweils ein Mega8. Übrigens sind diese gar nicht so einfach zu löten (TQFP, 1mm Lötzinn und eine viel zu große Lötspitze). Die Hauptplatine enthält den Regler und das RFM12-Funkmodul. Die Platinen “reden” über I²C. Die beiden freien Anschlüsse (auf der Sensorplatine unten rechts und am Elektronikkasten links) sind ISP-Schnittstellen. Die Motortreiber kann man nicht mehr programmieren.
Stefan Falk (23.7.2009, 18:37:35)
Ja der Wahnsinn. Da fällt mir echt nichts mehr ein. Stehender Applaus.
Gruß, Stefan
schnaggels (24.7.2009, 09:59:08)
Sehr solide, kann so in Serie gehen :)
fitec (24.7.2009, 19:00:24)
Das Modell ist mechanisch als auch Elektronisch der absolute Hammer! Ich habe mal eien Frage wegen der Motorenbefestigung: Einerseits sieht man, dass die Welle in einem (Kugel-)Lager im Gehäuse befestigt sind. Sehe ich es richtig, dass die Befestigung am anderen Ende nur durch 4 Schrauben, welche den Motor “festhalten” erfolgt?
Gruß fitec
kehrblech (24.7.2009, 20:52:59)
Das siehst du richtig. Hält super. Die Achsen sind übrigrens auch nur auf die Motorwellen draufgeklopft, ohne Kleber oder Schrauben. Leider ist mir bei einem Motor das Getriebe dabei etwas verbogen, der macht jetzt ziemlich laute Geräusche. Läuft aber immer noch so schnell wie die anderen. Trotzdem werde ich ihn irgendwann ersetzen.
Btw: hat jemand eine Idee wie ich an die Motoren noch “Impulstaster” (optische “Taster”) anbringen könnte?
schnaggels (29.7.2009, 11:57:30)
Einfach ne Strichcodescheibe auf die Welle machen? Wobei vor dem Getriebe wäre sicher besser, hattest du nicht im Getriebegehäuse vom PM noch Platz für sowas gefunden ;)
kehrblech (29.7.2009, 13:51:31)
Beim PM 8:1 passt es gerade so. Leider sind diese Motoren 50:1 und haben keinen freien Platz im Getriebe. Strichcode auf der Welle geht auch nicht, weil einfach kein Stück Welle frei ist. Man könnte auf die Motorachse, die hinten aus den Motoren heraussteht, eine kleine Scheibe kleben, aber der Platz zwischen den Motoren reicht nicht für drei CNY70.
Ich habe jetzt Lochscheiben von außen an die Achsen gebaut. 16 Löcher/Umdrehung, damit bekomme ich ca. alle 5mm einen Impuls. Soll ich nochmal ein Bild hochladen?