Kugelroboter - Fernsteuerung
Hochgeladen am 24.7.2009, 17:57 von kehrblech. 17 / 18
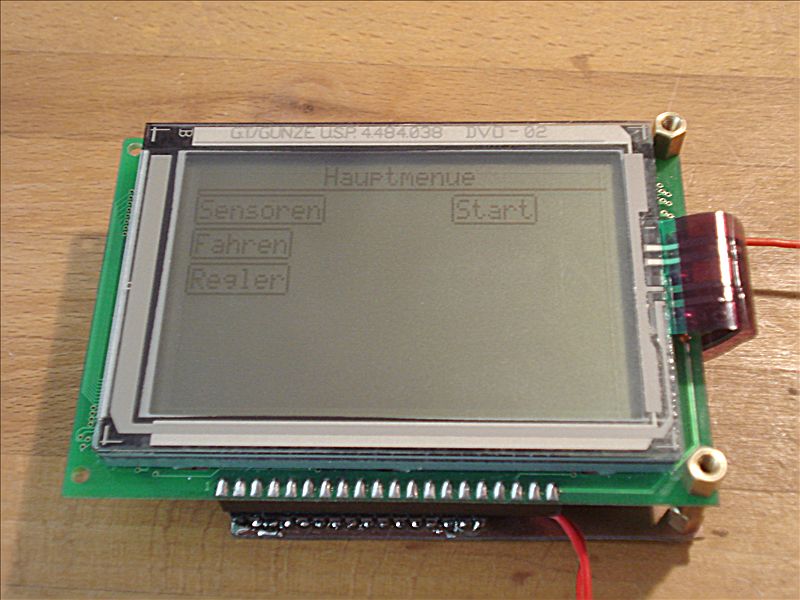
Im wesentlichen besteht die Fernsteuerung aus einem Grafik-Display. (Pollin 120 346). Auch wenn es da nicht steht: das Display hat eine Touch-Folie. Damit kann man sehr gut den Roboter bedienen. Vom Hauptmenü aus kann man verschiedene Funktionen aufrufen: Sensoren: Eine Art Mini-Oszilloskop. Die Werte der Sensoren des Roboters werden grafisch dargestellt und gleichzeitig über die RS232-Schnittstelle an den PC gesendet.
Fahren: Direkte Ansteuerungsmöglichkeit für die Motoren. Z.B um diese zu testen oder einfach nur zu zeigen, dass der Roboter in jede Richtung fahren kann.
Regler: Die Regelparameter des PID-Reglers können verändert werden. Sie werden auf dem Roboter gespeichert, nicht in der Fernsteuerung.
Start: Balancieren starten.
schnaggels (28.7.2009, 13:52:56)
Hey, super Tipp :) Hast du eigentlich Schaltpläne zum Projekt?
fitec (28.7.2009, 16:26:38)
Ich weiß nicht wie Jan es gemacht hat, aber es gab dazu eine Artikel im Elektor (Februar 2009). Das war ein Werbeartikel von mikroElektronika, sollte unter www.mikroe.com zu finden sein. Es gibt übrigens auch bei reichelt ein Touch Panel (EA DOGM TOUCH), kostet aber um die 10€ ohne Display.
Gruß fitec
kehrblech (28.7.2009, 17:29:01)
Schaltpläne habe ich nicht, nur die Layouts.