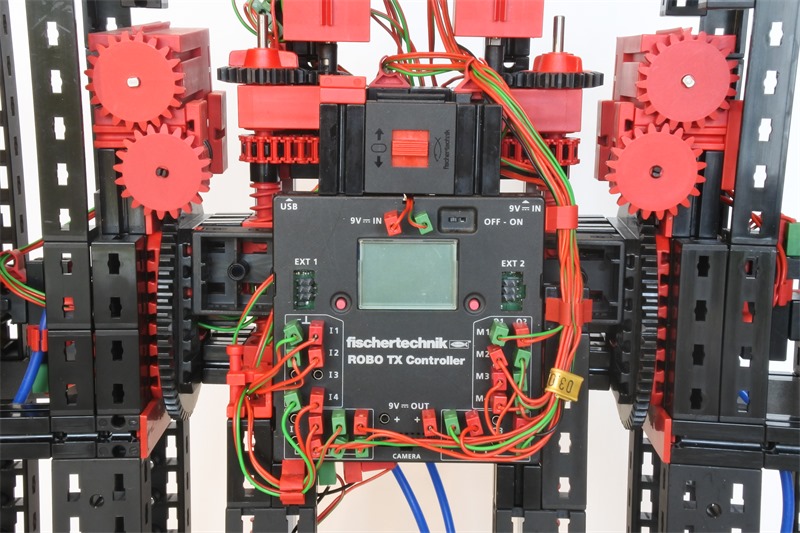
Nahaufnahme TX-Controller und Gelenke
Hochgeladen am 2.10.2017, 17:32 von Leon. 3 / 10
Links und rechts zu sehen sind die beiden Encodermotoren für die äußeren Beine sowie der TX-Controller der den Roboter kansteuert. Über den Polwendeschalter darüber kann man dem Programm mitteilen ob noch ein weiterer Schritt durchgeführt werden soll oder nicht.