Laufroboter - Elektronik
Hochgeladen am 7.2.2013, 14:24 von xbach. 9 / 10
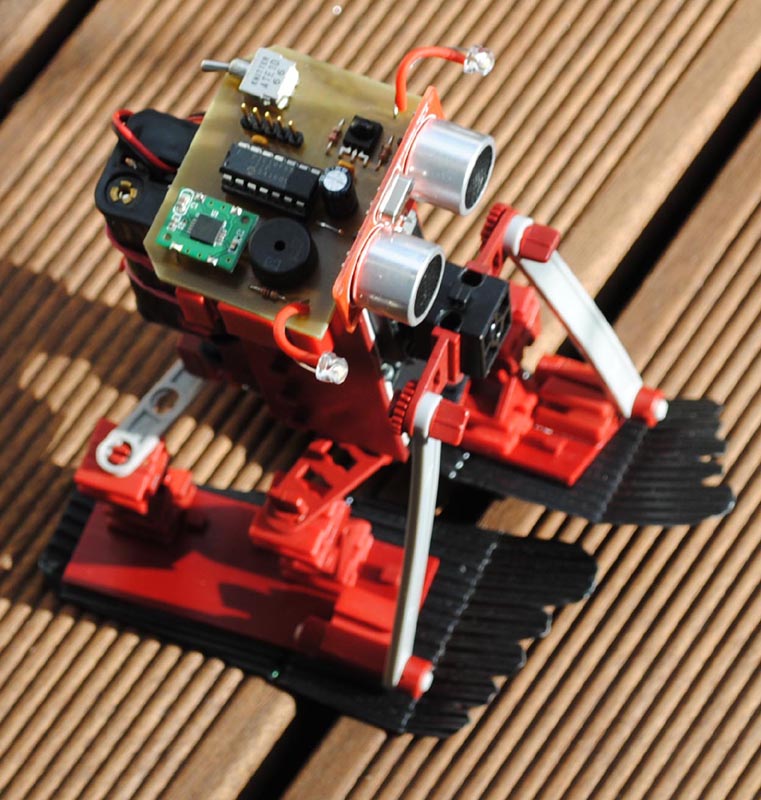
Beeper - Kompass - IR - Entfernung
Stefan Falk (7.2.2013, 19:03:57)
Nicht schlecht, Herr Specht! Kannst Du noch etwas mehr zur Elektronik und ihrer Wirkungsweise sagen bitte?
Gruß, Stefan
xbach (8.2.2013, 08:41:35)
Mikroprozessor: PIC16F88 8k ROM (SW: C programmiert) oä. ~2€ Kompasssensor: HDMM01 I2C (Pollin 6,95€), knifflig anzusteuern ! Summer: PIEZO Typ !! (wg. Kompass!) ~0,7€ IR Empfänger: TSOP1838 oä. ~1,5€ ( dekodiert Beamer - Fernbedienung ) Entfernungsmesser: Seeedstuidio , schön & einfach zum Ansteuern & preiswert (~ 15 $) Servos: Standard vollplastk ( Conrad < 9€ ) —- Konzept D.Buckley (Bambino) —- Ansteuerung nach Parallax Inc. / AREXX etc. —- Teile: Fischertechnik was sonst !
Eine eigene Printplatte ist nicht nötig, eine Lochrasterplatine reicht. Der Entfernungs- messer wird nur zu Kollisionserkennung genützt, ein einfacher IR-Detekor tut es auch. Der IR Empfänger könnte auch die IR FT Fernbedienung dekodieren (bei entsprechender SW). Der Kompass ist notwendig, da der Drehwinkel beim Drehen stark von der Rauhigkeit des Untergrundes abhängt und daher nicht berechenbar ist. Die Anforderungen an den Prozessor sind gering. Gruß, XBach
Stefan Falk (8.2.2013, 09:51:44)
Sind in dem PIC denn schon Treiber drin oder wie bekommst Du die Servos angesteuert? Gruß, Stefan
xbach (8.2.2013, 12:40:07)
Bei meinem Compiler ( CCS-PCM) sind viele Treiber (source) dabei, die man leicht an jede HW anpassen kann. Bei zwei Servos geht es aber einfacher mit:
- 20ms Rahmentimer - Servopin HIGH - warten (1-2ms) - Servopin LOW etc. Siehe auch: http://www.parallax.com/Portals/0/Downloads/docs/books/edu/toddler.pdf
Gruß, Xbach
Stefan Falk (8.2.2013, 14:07:52)
Danke, aber ich meine Leistungstreiber. Stemmt der µC direkt die Stromaufnahme der Servos?
Gruß, Stefan