von oben
Hochgeladen am 15.1.2007, 17:09 von Wert. 1 / 4
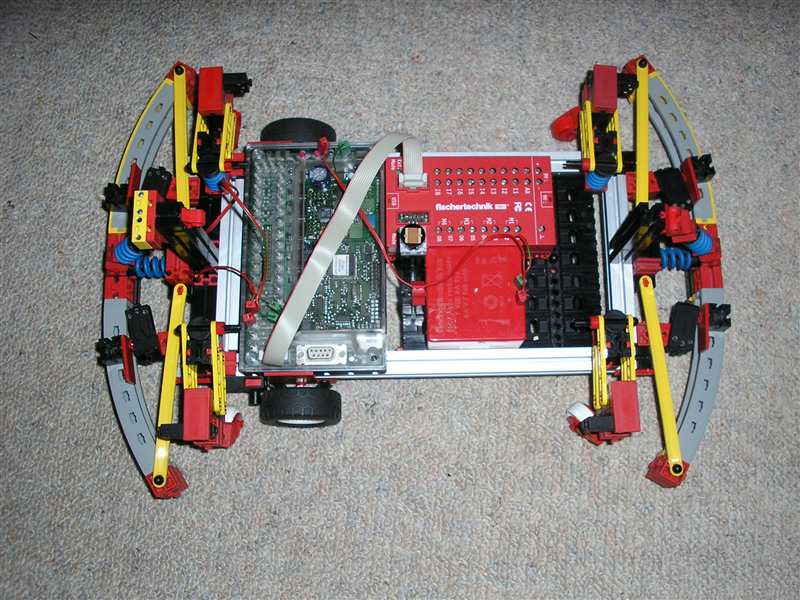
Das ist ein Roboter, der Licht und Spuren sucht und gleichzeitigKanten und Hindernisse erkennt. Es ist absichtlich ohne Sensorkabel Fotografiert. Das Modell ist leider etwas lang und breit geworden(breit wegen kombinierter Kanten/Hindernisserkennung, lang, weil ich nur in diesen Längen Alus habe. Ohne ist das Modell nicht stabil genug.) Es funktioniert aber einwandfrei. Das Programm werde ich bald mal hochladen
fitec (21.1.2007, 15:36:13)
Also das mit der Sabilität ist ganz einfach. Bau das Modell mit Grundbausteinen so lang wie du es möchtest. Damit es stabil ist, nimmst du eine Metallstange und tust sie in die Grundbausteine. Und schon ist das Problem gelöst.
Gruß fitec
fitec (21.1.2007, 15:37:32)
Äh, wofür ist eigentlich der Fotowiederstand in der Mitte?
Wert (21.1.2007, 15:58:09)
Nein, mit einer Metallstange geht das nicht, da an allen 4 Seiten des Alus angebaut wird, eine Metallachse geht somit nicht von einem zum anderen Ende.
Wert (21.1.2007, 16:00:32)
Den Fotowiderstandhabe ich am Anfang zur Lichtsuche verwendet, d.h., das Raumlicht wurde mit dem empfangenem der Fototransistoren verglichen. Letztendlich war mir das dann im Programm aber zu umständlich.