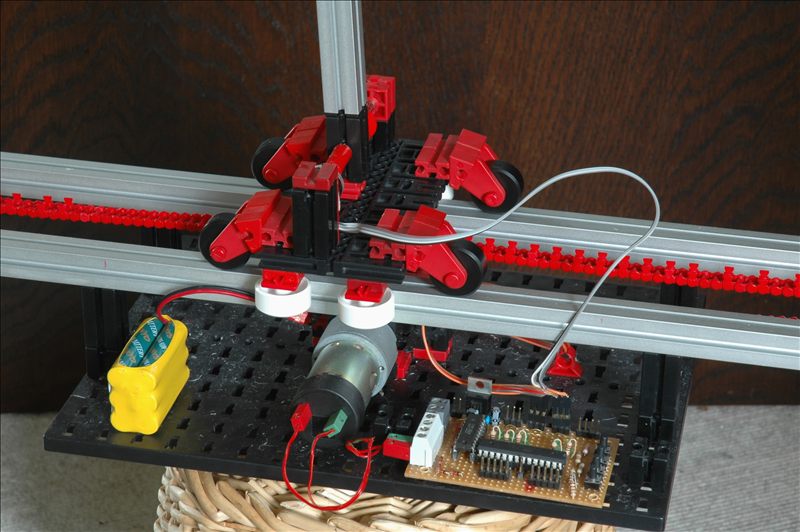
Rückansicht
Hochgeladen am 14.6.2008, 13:25 von kehrblech. 3 / 3
Für diesen Roboter musste ich mir ein eigenes kleines “Interface” bauen, weil das Robo Interface dafür zu langsam war.
Stefan Falk (14.6.2008, 13:46:37)
Nee oder? Boah wie abgefahren. Hut ab! Hast Du ein Video davon?
Gruß, Stefan
kehrblech (14.6.2008, 14:26:45)
Danke für dein Lob! Ein Video habe ich leider nicht kann auch keins machen.
Gruß Jan
pvd (15.6.2008, 09:31:27)
Kongratulierunge ! Wider ein “Magnum Opus” das mit fischertechnik gelungen ist ! Es wäre effektiv sehr interessant das alles mal auf Video zu haben, da kann man die Reaktionen und Geschwindigkeiten im Modell sehen. Lob !
schnaggels (16.6.2008, 10:44:25)
Klasse gemacht, schön das es auch Ausnahmen zum Schlechten Abscheiden bei Pisa gibt ;)
In welcher Sprache hast du den µC (vermutlich Atmel) programmiert?
Meist haben die Digicams auch eine einfache Funktion zum Videos aufzeichnen. Oder mit dem Handy falls da eine Kamera drin ist.
Mach auf jeden Fall weiter so, als Vater wäre ich sehr stolz auf so einen Sohn :)
Gruß, Thomas
kehrblech (16.6.2008, 15:13:52)
Der µC(Atmega8) ist in C programmiert.
Die Kamera hat keine Videofunktion, ich werde mal ein Video mit einem Handy machen, aber wieviel man darauf erkennen kann weiß ich nicht.
Gruß Jan
Fredy (17.6.2008, 12:00:59)