PIXY Pan/Tilt Objekterkennung RoboPro
Hochgeladen am 15.11.2014, 19:29 von DirkW. 2 / 8
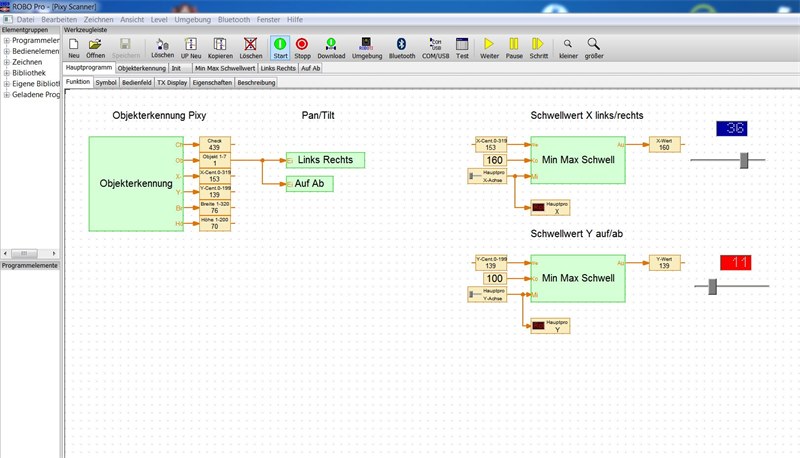
Hier dazu das passende RoboPro Programm (stelle ich in den Download Bereich)
Links seht ihr die Objekterkennung. Hier werden die Daten vom Pixy für ein Objekt ausgegeben.
Rechts seht ihr 2 Regler für die Schwellwerte von X und Y
Die Schwellwerte braucht ihr, damit euere Motoren etwas langsamer reagieren. So könnt ihr die Empfindlichkeit einstellen.