PIXY I2C-Kamera hinten
Hochgeladen am 10.11.2014, 20:16 von DirkW. 20 / 26
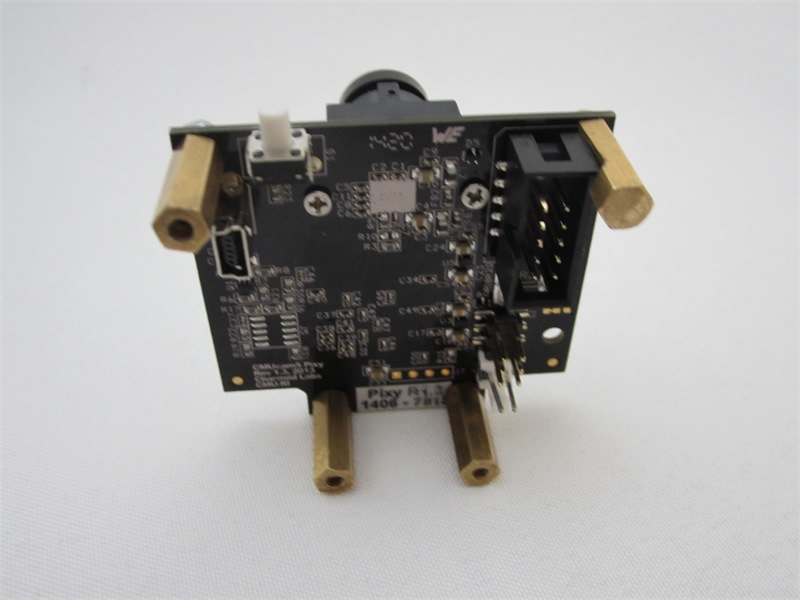
Hier seht ihr den 10-pol Anschluß.
Hierüber könnt ihr das I2C Signal auslesen. Die Stromversorung für die Kamera erfolgt hierüber ebenfalls. (5 Volt vom I2C des RoboTX-Controller.)
Unten rechts gibt es noch Anschlüsse für 2 Servos (pan/tilt) und einen separaten 5-10 Volt Anschluß.