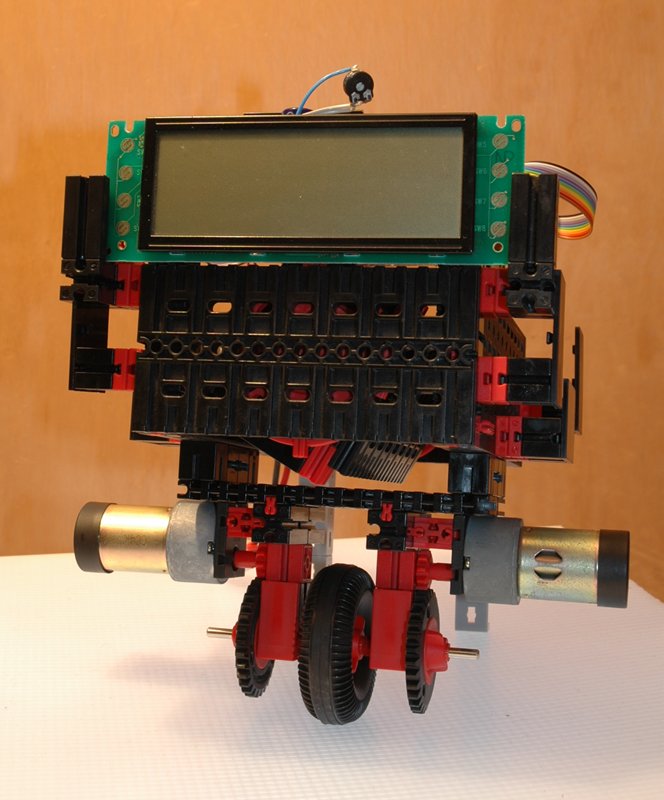
Gesamtansicht
Hochgeladen am 16.10.2008, 00:46 von kehrblech. 1 / 5
Der Roboter soll auf einem Rad balancieren: Mit dem Rad gleicht er eine Neigung nach vorne/hinten ausg, mit dem drehbaren Gewicht(hier kaum zu sehen) eine Neigung nach links/rechts. Allerdings ist das Gewicht viel zu leicht, sodass er immer nach links oder rechts umkippt. Er kann also nicht wirklich balancieren.
Harald (16.10.2008, 00:53:31)
Das ist ja nur noch COOL!!!
Mei, so ein Beutel voll Sand (oder Zucker oder was auch immer) als Ballast dürfte wohl kein Problem sein.
Gruß, Harald
kehrblech (16.10.2008, 11:09:06)
Doch leider schon:das zusätzliche Gewicht müsste in das drehbare Ausgleichgewicht. Die Motoren haben jetzt schon Probleme das Gewicht schnell die Drehrichtung ändern zu lassen und wenn es noch schwerer wird schaffen sie es nur noch sehr langsam -> in der Zeit ist der Roboter schon lange umgekippt. Also bräuchte ich stärkere Motoren. Vielleicht probiere ich es nochmal, aber jetzt versuche ich gerade einen Roboter zu bauen der auf einer Kugel balanciert.(einen ersten Antriebsversuch hatte ich schon bei dem Zweirad-Roboter hochgeladen) Die Mechanik ist schon fertig und funktioniert deutlich besser als letztes Mal.
Gruß Jan
Udo2 (16.10.2008, 14:22:52)
Hallo Jan, wenn du den zu hohen Körperschwerpunkt der Konstruktion angefangen mit den beiden Powers 8:1 weiter runterlegst und das Ganze nach oben lang und leicht zur Erhöhung der Balanceträgheit konzipierst ist die Problemstellung leichter zu lösen. Gruß, Udo2
kehrblech (16.10.2008, 16:20:15)
Muss der Schwerpunkt nicht möglichst hoch sein? Wenn ich einen Hammer mit dem Kopf nach unten auf der Hand balanciere kippt er sofort um, drehe ich den Kopf nach oben, schaffe ich es ihn zu balancieren
Gruß Jan
MisterWho (16.10.2008, 17:55:39)
Ich glaub was du eher brauchst ist viel Drehzahl. Gyroscop sagt dir bestimmt was, oder? :-) Wenn der Schwerpunkt weiter außen ist, hast du eine höhere Trägheit (m*r²) und es fällt langsamer um.
kehrblech (16.10.2008, 18:54:22)
Genau, das Gewicht hat umso mehr Wirkung je schwerer es ist und je schneller es sich drehen kann. Beides ist ohne stärkere Motoren nicht möglich, weil das Gewicht den Roboter nur beeinflusst während es die Drehzahl ändert. Es bringt mir deshalb leider gar nichts eine andere Übersetzung oder mehr Gewicht zu nehmen, weil die Motoren es dann einfach nicht mehr schnell genung beschleunigen können. Ich bin dann mal auf Motorensuche :-)
Udo2 (16.10.2008, 21:23:33)
Hallo Jan, beim balancieren eines Hammers mit Kopf nach oben brauchst du große horizontale Wege und damit hohe Anfangsgeschwindigkeit zum ausbalancieren … Damit es dir verständlicher wird, erinnere ich mal an das “Stehaufmännchen” Gruß, Udo2
thkais (16.10.2008, 22:46:06)
Udo2: Ein Stehaufmännchen ist eine ganz andere Sache. Dort ist der Schwerpunkt tatsächlich unterhalb des Drehpunktes. Mit einem genügend großen Rad wäre das möglich, aber der Grad der Herausforderung ginge dann gegen Null. Trägheit ist hier gefragt.
MisterWho (17.10.2008, 11:13:07)
Jan: Pollin Best.Nr.: 310 389 max 200W für 4,95. Fehlt noch ein passender Akku oder eine “Nabelschnur”.
schnaggels (17.10.2008, 16:39:18)
Als Gyroskop Antrieb oder? Mit bis zu 19000 U/min sonst kaum zu gebrauchen…
Udo2 (17.10.2008, 17:33:13)
@thkais Hallo Thomas, jetzt habe ich euch begriffen, es soll also 100% Herausforderung in der Version des auf dem Stiel stehenden Hammers sein. Ich hatte hier halt wegen der Anforderung an die Motorbeschleunigung an einen Kompromiß gedacht. Drücke dann kehrblech bei der Motorsuche die Daumen … Gruß, Udo2