Drive axle
Hochgeladen am 18.1.2014, 17:48 von winijenh. 4 / 20
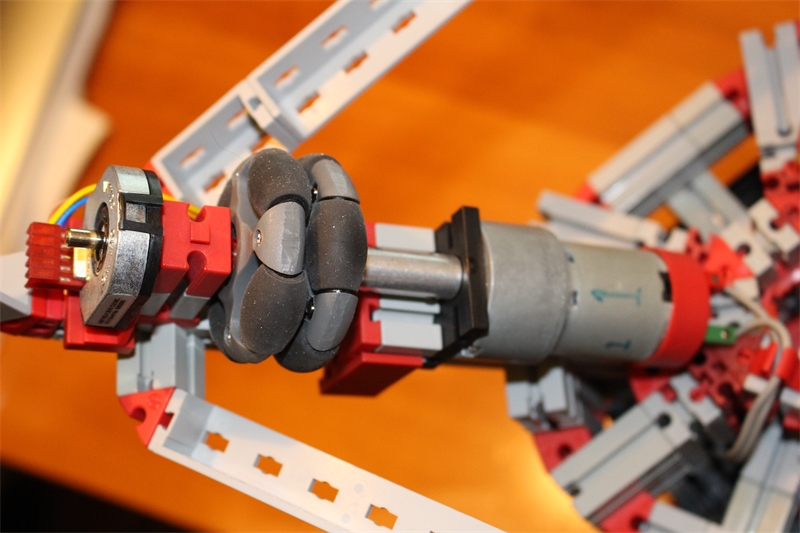
One of the 3 axles. For the first models I used rast axles that were connected to the power motors using a rast connector sleeve (35142). However, there is too much slack in these, and I resorted to metal axles and Graupner 4mm to 5mm shaft connectors (http://www.graupner.de/de/products/3374/product.aspx) to mount them onto the power motors.
Each axle has a quad encoder connected to know its position and speed. These are AMT-103 capacitive encoders by CUIC. They can be set to a wide range of frequencies to suit the limited TX counter inputs, that can realistically handle no more than 500 Hz. I glued them to a Lagerbock or Kupplungsstück 5 (38252), and fit them to the end of the axle. They operate at 5V and produce quad encoder A and B signals. I use the LS7183 IC by LSI Computer Systems to decode these into an up and a down counter. So each wheel uses two TX counter inputs. The TX simply subtracts the two values to find the wheel position. This means I need 2 TXs, as you need 3 axles times 2 counters is 6 counter inputs.
Too bad the TX counter inputs don’t have a mode to decode the quad encoder signals directly. I presume the TX counter input values are software based. If so, providing a mode that would produce a single counter value out of the quad encoder signals would be a relatively simple solution to implement. I bet ft will never do that. We need open source!
For the balancing function you need to know the ball or robot speed in the X and Y direction. This can of course be derived from the position information that the wheel encoders provide, but a Kalman filter (http://en.wikipedia.org/wiki/Kalman_filter) needs to be applied to provide smooth position and speed information. Screen shots of that in a later picture.
uffi (16.10.2015, 15:25:55)
I like your design! And I think that the capacitive wheel encoders you use are well suited for this purpose. I was trying to find a source for them, but without success. Where have you bought them?
Thanks and regards, Dirk
ft-ninja (5.11.2015, 19:13:41)
Hi uffi,
You could check http://www.digikey.com/product-detail/en/AMT103-V/102-1308-ND/827016
uffi (7.11.2015, 11:11:59)
Thanks for the link, ft-ninja. Wow, 23 US$ is quite expensive for hobby purpose. Therefore, I decided to stay with cheap optical wheel encoders.
Pollin has some with integrated Schmitt-Trigger for 0.25 Euro.
Gabellichtschranke VISHAY TCYS5201
That’s almost a factor 100 cheaper…