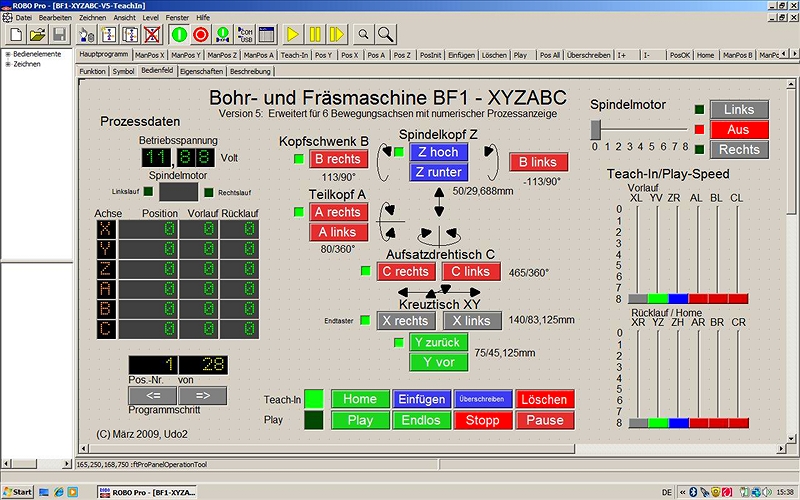
[5/5] BF1-2-RI, Screenshot Bedienfeld
Hochgeladen am 30.3.2009, 20:09 von Udo2. 5 / 5
Das Steuerprogramm ist vorläufig eine auf 6 Bewegungsachsen plus Arbeitsspindel erweiterte Modifizierung (jetzt 3.503KB) des “TeachIn.rpp” vom 3-Achs-Roboter des Baukastens Computing “Industry Robots II”.
Die Programmierung der Abläufe kann über dieses Bedienfeld modellseitig visuell gestützt für vielstufige Bearbeitungen an Werkstücken so leichter ausgeführt werden. Neben den dazu in der Mitte manuell anfahrbaren Bewegungskoordinaten (Impulszahl) können rechts über die Regler für die Vorläufe (vom Endtaster weg) und die Rückläufe (zum Endtaster zurück) für jeden Ablaufschritt individuelle Geschwindigkeiten (Motorstufen) gewählt werden. Ebenso sind für den Spindelmotor Drehrichtung und Motorstufe einstellbar. Das ergibt für jeden Schritt des Ablaufprogramms (Liste *.csv) bis zu 20 “Prozessdaten”. Während der Abläufe manuell “Teach-In” (voreingestellt) und automatisch [Play] können links in der Anzeige alle programmierten “Prozessdaten” verfolgt werden.
Die Handbedienung des Modells ohne ein Ablaufprogramm ist im Bedienfeld mit der Cursormaus über die Tasten und Regler arbeitsstufenweise natürlich damit ebenfalls komfortabel möglich.
Das Steuerprogramm benutzt vorläufig noch die unter ft momentan aktuelle Impulssteuerung Impulsrad 4 mit Mini-Taster. Bei Rechtsdrehungen der Drehachsen über den Endtaster hinweg ist hier noch zur Programmierung der Ablaufprogramme ihr Editieren unter MSEXCEL notwendig (Impulse mit Minusvorzeichen). Steuerprogramm und Modell werden mit der Verfügbarkeit hierfür geeigneter ft-Neuheiten aus 2009 fortentwickelt (Etappe 4).
Geladen ist hier im Steuerprogramm ein Ablaufprogramm mit 28 Schritten, dessen Ablauf ich zur vorläufigen Demonstration der 6 Achsenbewegungen am Modell als Video aufgenommen habe. Bewegt werden die Achsen in der Reihenfolge XYZABC, die Linearachsen in voller Länge, die Drehachsen wegen der Videolänge nach links und rechts vom Endtaster weg je nur 45°.
schnaggels (3.4.2009, 00:42:28)
uff :o
Udo2 (6.4.2009, 21:16:25)
Die gewählte Datenstruktur für das Listenfeld ergibt durch die Trennung der Speed-Listenfelder in Vor- und Rücklauf übersichtliches Arbeiten. Die Änderung der Positionskoordinaten (Impulszahl) von Schritt zu Schritt signalisiert aber auch die Bewegungsrichtung, steigend vom Endtaster weg (Vorlauf) und fallend zum Endtaster zurück (Rücklauf). Damit braucht man nur ein Listenfeld je Bewegungsachse für den Speed. Es können 6 Listenfelder eingespart und z.B. folgende erweiternde Konfigurationen für 1 IF + 2 EM unter Nutzung der 20 möglichen Felder modifiziert werden
- 10 Bewegungsachsen mit individuellem Speed je Schritt in beiden Bewegungsrichtungen
- 8 Bewegungsachsen plus 2 Arbeitspindeln, individueller Speed je Schritt in beiden Bewegungs- und Drehrichtungen In einer 21. Listenspalte des Ablaufprogramms kann man sich dazu über MSECXEL die Übersicht unterstützende Notizen speichern.
Udo2 (7.4.2009, 10:41:02)
So spät war’s doch noch gar nicht: MSEXCEL :o)
Udo2 (17.10.2009, 15:08:27)
Hallo, wie ich gerade bemerke, bedarf mein vorstehender Kommentar vom 06.04.09 noch einer Ergänzung. Die dort angedachte Organisation der Datenfelder ist grundsätzlich machbar. Das Steuerprogramm benötigt jedoch für jeden Achsenmotor Index für Index eine Auswerteroutine der Wegimpulstendenz (steigend oder fallend) um daraus die Ableitung der Ansteuerung der Drehrichtung der Motors vorzunehmen. Das ist auch machbar bedeutet aber zusätzlichen Aufwand im Steuerprogramm. Also werde ich mal im Fanclubforum anfragen, ob einfacher die 20 Listenfelder je Index nicht erweitert werden können :o). In der ROBOPro-Version 2.1.3.15 konnte ich jedenfalls nach erster Lesung der Online-Hilfe, des pdf-Handbuches und im Programm selbst dazu nichts Erhellendes finden. Gruß, Udo2
Udo2 (20.10.2009, 17:58:57)
Hallo, der Vorschlag zur Erweiterung der CSV-Listenfelder wurde von ft positiv aufgenommen. Vorläufig bleibt als Alternative das Arbeiten mit 2 parallelen Listen (2x20 = 40 Felder). Gruß, Udo2
TiTo (4.2.2010, 17:47:37)
daS PROGRAM
Udo2 (4.2.2010, 22:45:07)
Hallo TiTo, das oben hilfsweise über das Bedienfeld vorgestellte Programm ist noch nicht “DAS Programm”. Meine Arbeit an seiner Weiterentwicklung ruht z.Zt. Die aktuelle erweiterte Motorsteuerung unter RoboPro (wegsynchrone Funktion) mit Encodermotoren ist auf die ft-Modelle zugeschnitten und hierzu noch nicht weiterführend. Es sind mit ihr mit meinem Modell BF1-2 “nur” rechtwinklige und 45° schräge Achsenbewegungen synchronisiert möglich. Sobald die Weiterentwicklung der erweiterten Motorsteuerung zur umfassenden (zeitsynchrone Funktion) verfügbar ist, werde ich die Arbeit daran fortführen. Gruss, Udo2