Anlieferung der Tonne durch den mobilen Roboter
Hochgeladen am 30.1.2018, 16:23 von uffi. 1 / 4
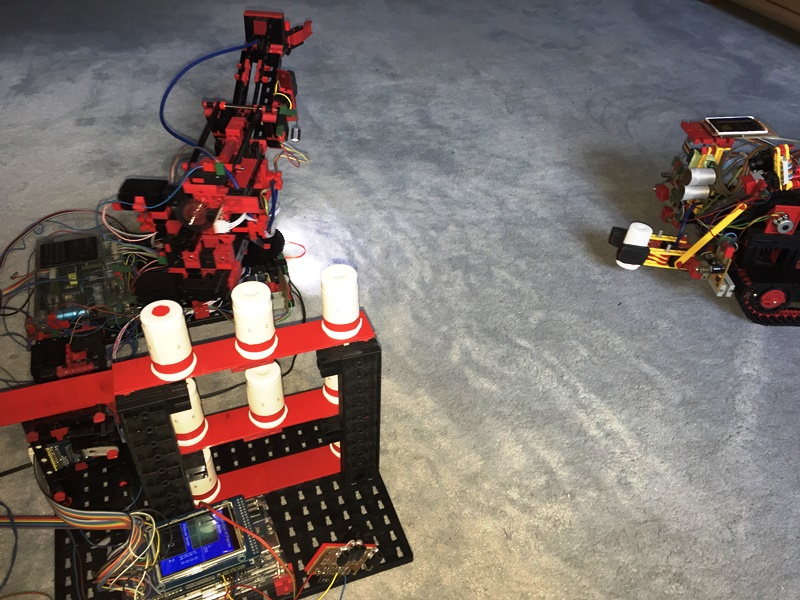
Ein mobiler Roboter mit Greifarm sammelt markierte Tonnen ein und übergibt sie einem stationären Knickarm-Roboter zur Einlagerung in ein Hochregallager. Die Tonnen und ihre Entfernung vom Greifarm werden anhand ihrer roten Farbmarkierung vom mobilen Roboter erkannt, der über eine CMOS-Kamera OV7670 mit Bildverarbeitung verfügt. Dann fährt der mobile Roboter die Tonnen zum stationären Roboter, den er an dessen Positionslichtern erkennt und dessen Entfernung er aus der y-Position der Positionslichter abschätzen kann. Der stationäre Roboter lädt die Tonnen in eine Station mit einer weiteren CMOS Kamera OV7670 mit Bildverarbeitung, die die Ziffern auf den Tonnen erkennt. Dann werden die Tonnen entsprechend ihrer Ziffern in ein Hochregallager einsortiert.
Video gibt es hier:
https://www.youtube.com/watch?v=h7dR_Q8h76U&t=184s
Stefan Falk (1.2.2018, 13:28:12)
Wow, was für eine grandiose Gesamtleistung. Da hast Du ja wieder alle Register gezogen.
Gruß, Stefan
uffi (1.2.2018, 14:20:23)
Danke, Stefan, für Dein überschwängliches Lob.
Da der mobile Roboter schneller ist im Tonnen Anliefern als der stationäre Roboter im Tonnen Wegräumen, habe ich jetzt noch eine Synchronisation der beiden eingebaut: Der mobile Roboter wartet mit der eingesammelten Tonnen auf ein Infrarot-Signal des stationären Roboters bevor er die Anlieferung der Tonne ausführt. So kommen sich die beiden nicht ins Gehege.
Gruß, Dirk