Drehbarer Roboterarm
Hochgeladen am 22.3.2013, 10:51 von Stefan Falk. 7 / 10
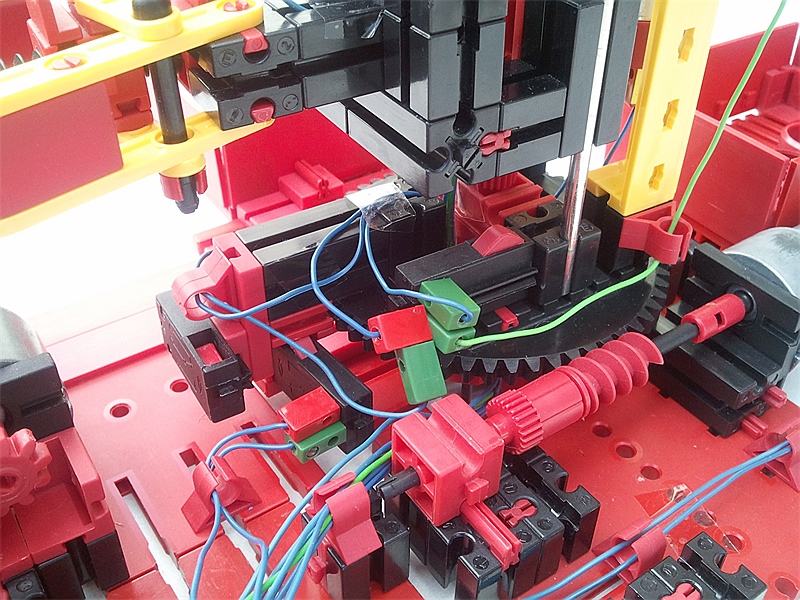
Ein Power-Motor dreht den Roboter in eine von drei Positionen: Eine zum Teile vom Band Abheben und je eine über den beiden Ablagefächern. Positions- und Endlagetaster für die Drehbewegung sowie fürs Anheben und Absenken des Arms dürfen natürlich nicht fehlen.