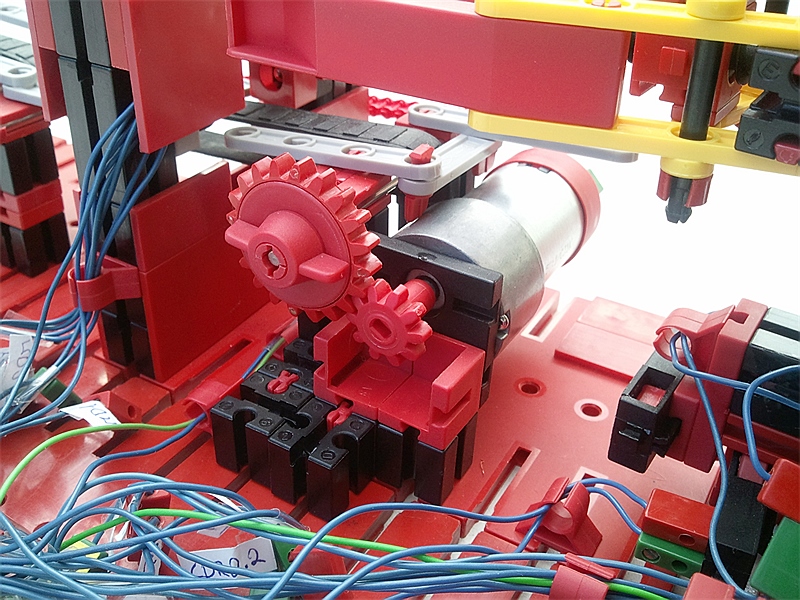
Förderbandantrieb
Hochgeladen am 22.3.2013, 10:51 von Stefan Falk. 5 / 10
Das Förderband läuft die ganze Zeit, außer wenn gerade ein Teil gemessen oder mittels Greifer vom Band entnommen wird.
Rechts sieht man einen Positionstaster für die Drehbewegung des Roboterarms.