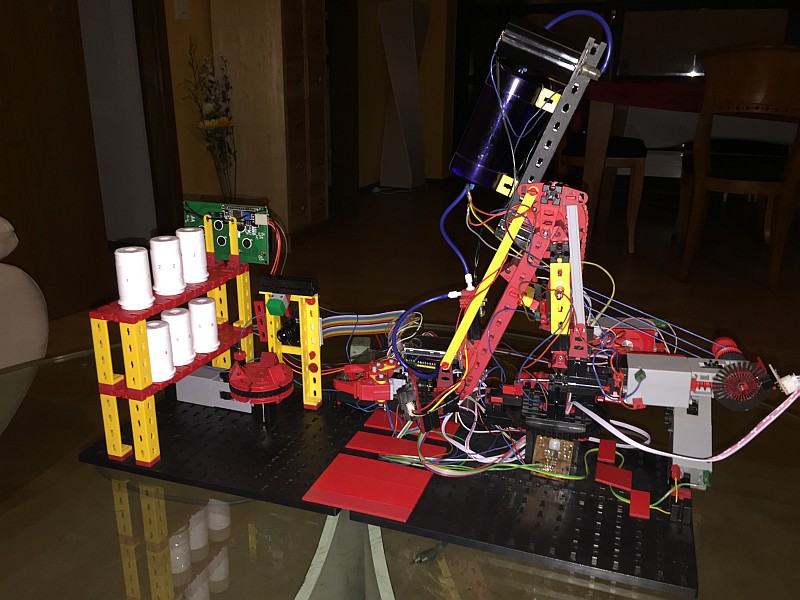
Einsortieren von Tonnen mit Ziffernerkennung
Hochgeladen am 10.4.2015, 16:19 von uffi. 7 / 10
Schlagworte: Bildverarbeitung, Ziffernerkennung, ATMEGA2560, TFT, Omnivision, OV7670, Kamera, Sharp, GP2D12, Entfernungsmesser, Drehteller, Hochregal.
Weiter umgebaut und erweitert um:
- ATMEGA2560 Controller mit TFT 2,4”
- Omnivision OV7670 Kamera
- Sharp GP2D12 Entfernungsmesser
- Drehteller
- Hochregal
Der Roboter räumt mit Ziffern markierte Tonnen auf. Die Tonnen werden nach Ziffernerkennung sortiert ins Hochregal eingeräumt.
uffi (10.4.2015, 17:14:45)
Hier gibt es ein Video, wie der Roboter aufräumt:
lemkajen (11.4.2015, 11:54:32)
Beachtliche Maschine!
DirkW (11.4.2015, 12:26:43)
Halo Dirk,
tolle Leistung. :-)
Wie bekommst du die Bilderkennung der Zahlen hin? Sind diese als Matrix gespeichert?
Gruss Dirk
uffi (11.4.2015, 15:46:29)
Danke für Eure Kommentare und das schöne Lob!
Die Bilderkennung der Ziffern habe ich in meinem Artikel in der ftpedia 04/2014 genau beschrieben. Nur kurz hier: Die Ziffern werden jeweils nach der Anzahl der schwarz-weiß-Übergänge in x- und y-Richtung charakterisiert, wobei noch unterschieden wird nach der oberen und unteren Hälfte für die x-Richtung und nach der linken und rechten Hälfte für die y-Richtung. Es gibt also für jede Ziffer vier charakteristische Größen, mit Hilfe derer sie eindeutig erkannt werden..
lemkajen (12.4.2015, 10:10:03)
Ich finde insbesondere die Verabeitungsgeschwindigkeit (speziell die der “Bilderkennung”) sehr beeindruckend..! - siehe youtube-video. daher an dieser Stelle: Noch mehr Respekt! Gruß Jens
uffi (12.4.2015, 18:38:41)
Danke, Jens! Die Hauptzeit bei der Bildverarbeitung wird damit verbracht, zu warten, bis der Drehteller die Ziffer in Position vor der Kamera bringt. Die eigentliche Ziffernerkennung braucht weniger als 100 ms. In Summe werden mit Darstellung des Originalbildes und des gefilterten Bildes auf dem Farb-LCD + dem Algorithmus zur Ziffernerkennung ca. 250 ms benötigt.
Gruß, Dirk
uffi (21.1.2018, 21:36:18)
Ich habe den Knickarm-Roboter jetzt ersetzt durch ein Modell aus dem Baukasten Industry Robots, da die Tonnen damit sehr schön präzise horizontal ins Hochregallager gefahren werden können.
Ich lasse nun dem Knickarm-Roboter die Tonnen durch einen mobilen Roboter anliefern. Beide Roboter verfügen über eine Kamera und Bildverarbeitung. Die Zusammenarbeit der beiden Roboter seht Ihr hier im Video:
oder
https://www.youtube.com/watch?v=h7dR_Q8h76U&feature=youtu.be