Roboterarm 1
Hochgeladen am 17.8.2008, 18:33 von StefanL. 1 / 19
Stefan Falk (17.8.2008, 22:38:41)
Sieht cool aus. Wie wär’s noch bitte mit ein paar Beschreibungen? Wie steuerst Du ihn denn an?
Gruß, Stefan
StefanL (18.8.2008, 18:41:44)
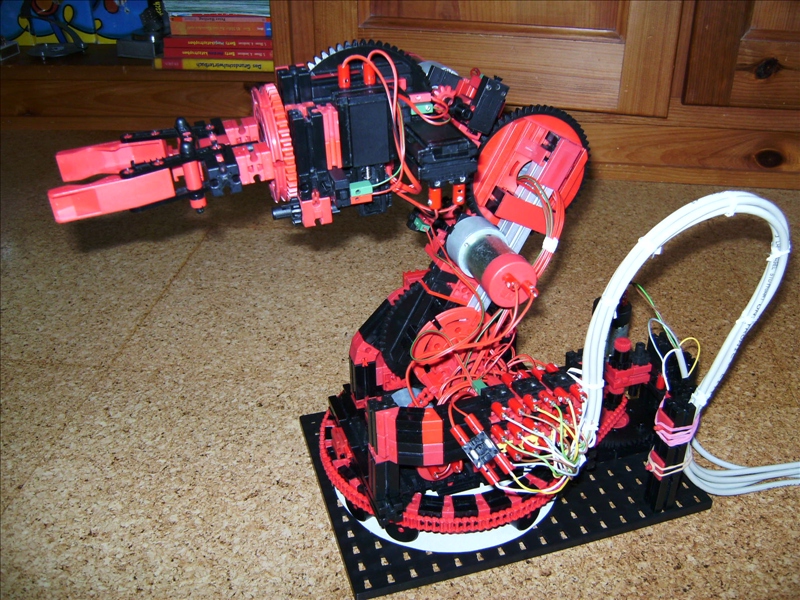
Angesteuert wird er später mit RoboPro. Das Interface muss ich noch anschließen und das Ganze noch programmieren, aber das Modell an einem Tag zu bauen reicht ja auch. Die Bewegungen sind ziemlich schnell da die Powermotoren direkt an Drehkränzen angebaut sind.
Gruß Stefan
Fredy (18.8.2008, 19:48:01)
Hallo, die Motoren jetzt gegen Schrittmotoren austauschen, das wäre bestimmt interessant.
Gruß Frederik
StefanL (18.8.2008, 20:55:57)
Das hatte ich auch zuerst vor aber so stark sind die Schrittmotoren dann doch nicht.
Gruß Stefan
Udo2 (18.8.2008, 23:23:49)
Hallo StefanL, Gratulation zu dieser Konstruktion, scheinst in den Details ein geborener Konstrukteur zu sein. Es kommt ehrliche Freude auf, Derartiges betrachten zu können. Mal ausgehend von mit Waits beherrschbaren 3U/s der ft-Schrittmotoren hast du doch Übersetzungsreserve beispielsweise mit 3:1 und damit einen 3-fachen Kraftgewinn zumindest in den Gelenken. Egal ob das z.B. reicht, steht aber generell die Frage der Machbarkeit eines Freiarmroboters mit mehreren Drehachsen mit ft-Teilen. Die Federelastizität der Verbindungen und auch einzelner Teile führt meist dazu, dass am Greifer die gewollten Steuerkoordinaten für feinfühliges Operieren nicht ankommen. Korrekturen sind schwer wenn überhaupt beherrschbar, weil sie in jeder Winkel- und Hebellage der Gelenke andere sind. Wenn dieser Roboter aber dann mit einer Steuerung ausgerüstet zumindest die gewünschten Bewegungen ausführt verbleibt dennoch Zufriedenheit über ein gelungenes Modell. Also mach weiter, wir sind sicher alle gespannt über die zu erwartende Endausführung. Ich drücke dir dazu beide Daumen. Gruß Udo2
Udo2 (20.8.2008, 09:51:16)
Hallo StefanL, eines möchte ich aber noch abschließend nicht vergessen. Das ft-System ermöglicht mit überwiegend eingesetzten Nylonteilen dynamisch nur eine begrenzte Schwingungssteife. Zwischen ihr und den Beschleunigungs- sowie Bremkräften des Antriebs besteht ein Zusammenhang, aus dem man nicht ausbrechen kann. Ob da ein schneller Direktantrieb mit Power-Motoren die optimale Lösung ist? Beschleunigungs- und Abbremsrampen sind zwar programmierbar, könnten dann aber in den unteren Geschwingigkeitsstufen u.U. ruckelig werden und das System wiederum aufschaukeln. Gruß Udo2