Gelenk 6 (3906)
Hochgeladen am 22.4.2014, 16:15 von bummtschick. 20 / 42
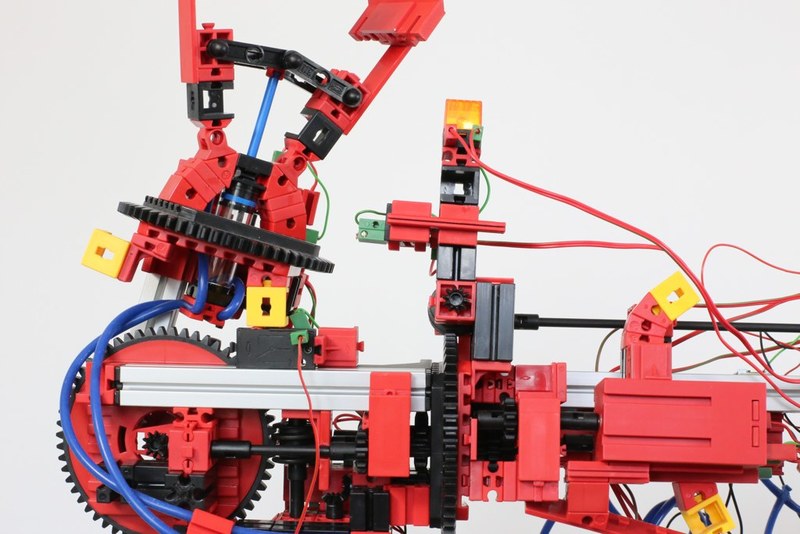
Gelenk 6 rotiert den Greifer selbst, so dass man Teile in verschiedenen Positionen greifen kann. Hier sind am meisten Zahnräder am Werk: angetrieben wird Gelenk 6 tatsächlich von dem hinteren der beiden Encodermotoren vor Gelenk Nr. 4.