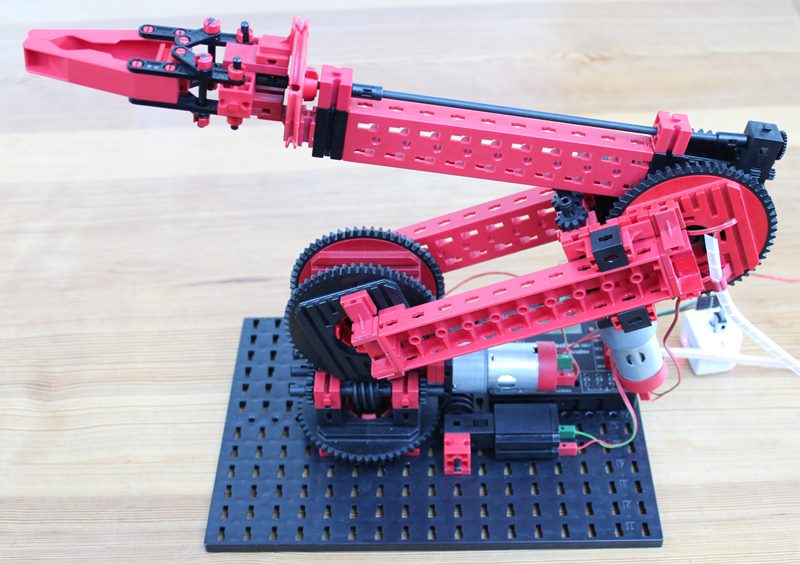
Gesamtansicht Knickarm-Roboter
Hochgeladen am 10.8.2014, 15:00 von Dirk Fox. 1 / 7
Der Knickarm-Roboter wird von zwei Power-, einem Mini- und einem XS-Motor (Greifer) angetrieben. An den TX ist via I²C-Protokoll ein kabelloser Nunchuk als Fernsteuerung angeschlossen.
Lurchi (11.8.2014, 22:55:32)
Hallo,
die Konstruktion sieht, auch ohne die bei Mehrarm-Robotern oft verwendeten Aluprofile, sehr stabil aus.
Da sich Aluprofile oft als Zapfen-Killer herausstellen, sollte man dieser Konstruktion eine besondere Beachtung schenken.
Kompliment!
Gruß+Dank
Lurchi
Marten70 (12.8.2014, 00:23:35)
Super Modell: Leichtbau und doch sehr stabil. Die Minimot zur drehen der Greifer ist sehr klug plaziert: so wenig wie möglich Masse am Ende eines Armes. Spitze!
Mfrgr Marten
thomas004 (12.8.2014, 11:04:28)
Schaut wirklich gut aus!!!
Aber welchen Sinn hat die Drehscheiber am Greifer, wenn der sich doch gar nicht dreht?
Gruß, Thomas
Dirk Fox (12.8.2014, 12:48:19)
Ach, Thomas, Du Adlerauge… Dort ist der nächste Freiheitsgrad in Arbeit (hinter die Drehscheibe kommt ein Z40), und dann soll der Greifer auch noch kippbar werden - alles von Minimots aus dem “Kniegelenk” heraus gesteuert. Ist aber etwas knifflig. Mal sehen, ob ich das bis zur Convention hinbekomme. Gruß, Dirk
bummtschick (26.8.2014, 18:36:34)
Lieber Dirk, die Konstruktion mit den jeweils doppeltem Drehkranz und drei Z10 pro Gelenk hat mich so beeindruckt, dass ich meinen Aluroboter “Bertha” (http://www.ftcommunity.de/categories.php?cat_id=2884) gleich noch ein zweites Mal gebaut habe. Mit Alus natürlich. :-) Ich lade jetzt gleich mal neue Bilder hoch, um Dir einen Eindruck zu geben, und bringe beide Versionen zur Convention mit. Ich hoffe, dass wir uns da mal austauschen können!