Antrieb schwenken
Hochgeladen am 10.5.2021, 19:41 von Website-Team. 27 / 55
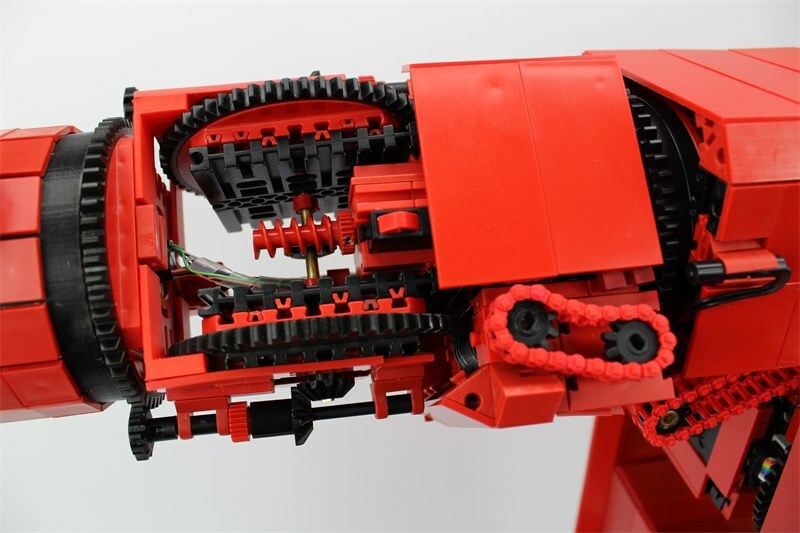
Zum schwenken des Kopfs wird ein Encodermotor (rechts) eingesetzt. Mittig der Encodermotor zum drehen des Kopfs.
Zum schwenken des Kopfs wird ein Encodermotor (rechts) eingesetzt. Mittig der Encodermotor zum drehen des Kopfs.