Gesamtansicht
Hochgeladen am 8.9.2016, 14:31 von Stefan Falk. 1 / 2
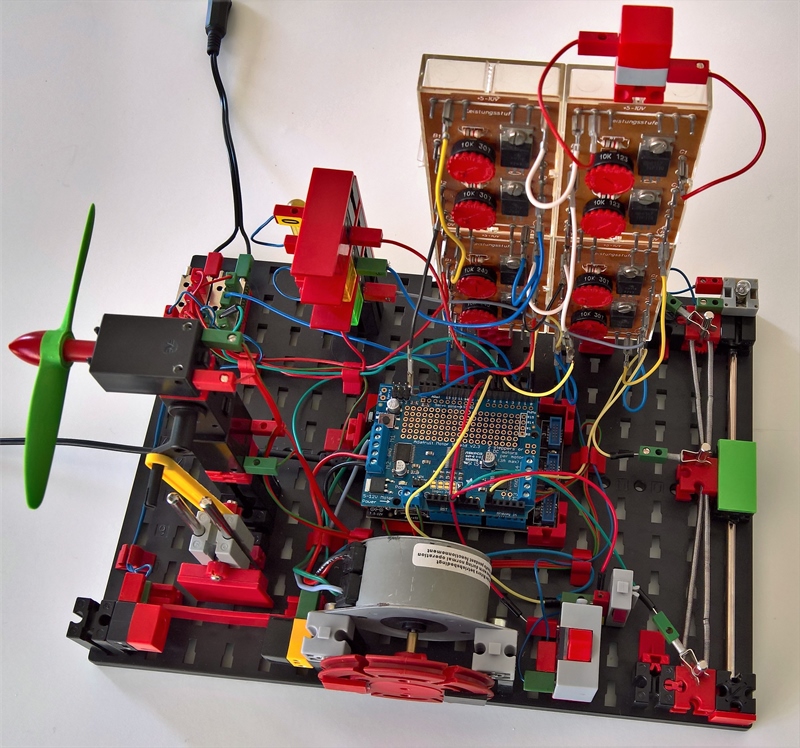
In der Mitte sitzt (sichtbar) ein Adafruit 2.3 Motor Shield und darunter ein Netduino 3 WiFi (WLAN wird in dieser Demo aber nicht verwendet). Das Board fährt das Microsoft .NET Micro Framework (4.3) und steuert über ein hübsch strukturiertes C#-Programm folgende Modelle unabhängig voneinander:
-
Die Ampel links hinten.
-
Die kleine Exzenter-Presse links vorne, die immer langsam und stetig anläuft, aber sofort anhält, wenn man die Lichtschranke davor unterbricht.
-
Den Schrittmotor vorne in der Mitte, der mit je einer Sekunde Pause zufällige Positionen ansteuert, und zwar mit sanftem Beschleunigen und Bremsen.
-
Das Selbstbau-Schiebepotentiometer ganz rechts am Rand, das den Ventilator links beliebig zwischen “volle Kraft zurück” über “Stillstand” bis “volle Kraft voraus” ansteuert.
-
Der - genauso wie die anderen 4 als “Modell” in Software implementierte - große Not-Aus-Taster rechts neben dem Schrittmotor. Wir der betätigt, halten alle Modelle schlagartig an und die rote Lampe rechts oben blink, bis man alles durch Druck auf den Minitaster neben dem Not-Aus-Taster wieder weiterlaufen lässt.
david-ftc (8.9.2016, 18:03:17)
Hallo Stefan,
ein schöner Aufbau ist dir hier gelungen, der zeigt, dass auch der Netduino eine gute alternative zum ft System sein.
Besonders das Selbstbau-Schiebepotentiometer aus der alten Antriebsfeder finde ich klasse. Daran zeigt sich einmal wieder, wie vielfältig sich ft einsetzen lässt. Noch eine technische Frage: Theoretisch vergrößert sich der Widerstand proportional zur Länge des Leiters. Welche Genauigkeit hat der Aufbau? Da wäre es doch cool, sich mit dem Netduino noch eine Kennlinie zeichnen zu lassen, oder?
Grüße David
Stefan Falk (8.9.2016, 18:12:53)
Oh ja, da ist noch Raum für gaaanz viele Experimente. Dies hier ist nur ein erstes Antesten, um auszuloten, was man dem Board zumuten kann und wo die Grenze ist.
Der Poti läuft hier als Spannungsteiler (zum Analogeingang geht der Schieber-Anschluss). Da der Gesamtwiderstand nur 20 (oder 40? weiß grad nicht mehr) Ohm waren, hängt der Poti aber in Serie mit dem ft-Lämpchen rechts oben, um die Stromquelle nicht unnötig zu belasten.
Per schöner Input-Konverter-Klasse wird das Signal vom Poti selbstlernend auf einen Wertebereich zwischen -1.0 und +1.0 skaliert, und das geht zum Motorausgang für den Ventilator.
Gruß, Stefan
DasKasperle (22.10.2016, 17:28:35)
Hallo Stefan, einen schön kompakte und vielfältigen Versuchsaufbau hast du da. Der schiebe Poti ist mir auch direkt ins Auge gesprungen. Den werde ich bei Zeiten auch mal probieren.
k.G
Stefan Falk (3.4.2018, 19:50:57)
As requested, here is an English version of the description:
In the middle you see an Adafruid 2.3 motor shield. Below of that there is a Netduino 3 WiFi (howerver, I am not using WiFi in this demonstration). The board runs Microsoft .NET Micro Framework 4.3 and controls the following models, fully independent one from another, using a nicely structured C# program:
-
The traffic light on the left side.
-
The little excenter press on the left front side. It starts slowly and steadily to full speed, but it stops immediately if one breaks the light barrier infront of it.
-
The stepper motor in the middle front side. Every second, it drives to another (random) position, and it does this using smooth acceleration and deceleration.
-
The self-built long potentiometer on the right edge, which controls the fan on the left side between “full speed left turn” to “full speed right turn”.
-
The big emergency stop button to the right of the stepper motor, which is implemented just as the other 4 models as an abstract “Model” in software. If you press it, all models immediately stop, the red lamp on the right side blinks until you restart everything by pushing the smaller button next to the emergency stop button.