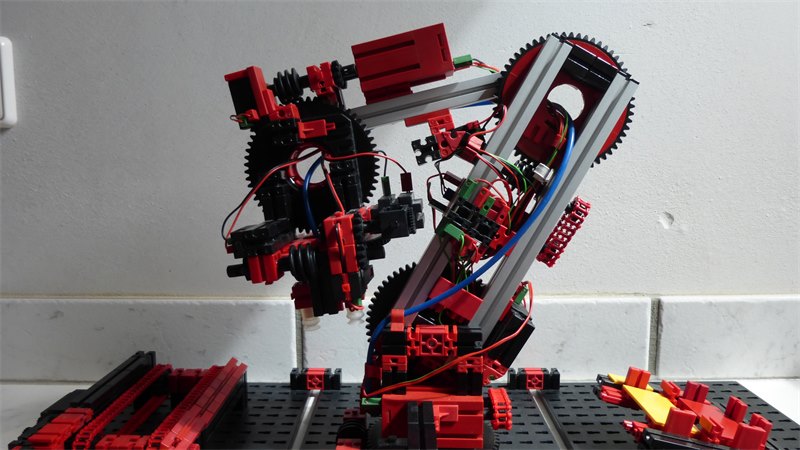
5-Achsroboter
Hochgeladen am 31.7.2015, 11:29 von david-ftc. 2 / 10
Steurung des Roboters über X / Y Koordinaten, Programm errechnet daraus die Winkel für die Achsen A, B und C Der gesamte Aufbau sowie die zwei Vakuumsauger sind drehbar. Die Steuerung ist identische mit der von meinem ersten 5-Achsroboter: http://ftcommunity.de/categories.php?cat_id=2990