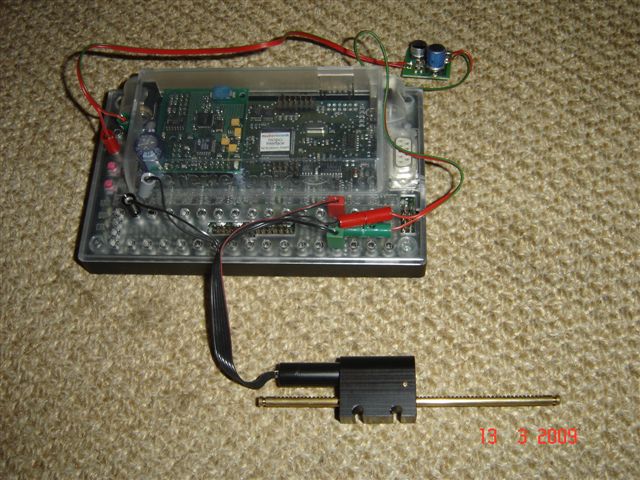
Klepstuw + Maxon-Encoder-Motor
Hochgeladen am 15.3.2009, 13:46 von peterholland. 58 / 87
FtfanClub (15.3.2009, 22:56:01)
wie hast Du den angeschlossen, die einzelenen Pins belegt ? Kannst du die Position auszählen ?
Gruß Micha
peterholland (16.3.2009, 21:11:17)
Pin: 1 Motor+ (rot) 2 VCC (= +5V mit Conrad 5V Spannungsregler) 3 Channel A (an A1 Robo-Interface ) 4 Channel B 5 GND (= - Conrad 5V Spannungsregler) 6 Motor-
(Wenn man Channel A an A1, und Channel B an A1 der Robo-Interface verbindet, ist es mit einem RoboPro-Programm möglich die Drehrichting fest u stellen) Pin type DIN 41651 (Typ 3M 89110-0101 HA) flat band cable AWG 28 Output signal VCC = 5 VDC TTL compatible Phase shift 90°e ± 45°e Power input at VCC 5 VDC max.8 mA Inertia of the magnetic disc 0.03 gcm2
Mit dem heutigen Robo Interface funktionieren die Encoder-Getriebemotoren (schon) gut mit “Channel A” oder “Channel B” als analogen A1 Spannungs-eingang und ein Impulszähler. Schau mal bei RoboPro-Programm
Gruss,
Peter Damen Poederoyen NL
schnaggels (21.4.2009, 15:18:15)
Hallo Peter,
die Impulse von dem Motor sind doch viel zu schnell für das Robo-IF. Hast du die mal gezählt und geprüft?
Gruß, Thomas
peterholland (21.4.2009, 16:11:16)
Hallo Thomas,
Die Encoder-Getriebemotoren funktionieren mit “Channel A” oder “Channel B” als analogen A1 Spannungs-eingang und ein Impulszähler für einige hin und u Bewegungen Schau mal bei RoboPro-Programm (Download)
Ich habe aber nicht geprüft ob nach Z.B. 300 hin und zuruck Bewegungen es noch die Gleiche Position gibt.
Gruß,
Peter Damen Poederoyen NL
peterholland (23.1.2010, 14:56:24)
Die Maxon Encoder-Getriebemotoren funktionieren auch mit dem TX mit “Channel A” oder “Channel B” als analogen I1 10V-Spannungs-eingang.
Als direkter 5V-Spannungsversorgung für die Encoder nutze ich TX-PIN-Belegung-EXT2 1=GND und 2=5V DC-out.
Anschluss am schnellen Impulszähler C1-4 funktioniert leider nicht.
Link zum Encoder der Maxon-Getriebemotor:
http://www.ftcommunity.de/data/downloads/dokumente/technischeinformationen/encoder.pdf
Grüss,
Peter Poedeoyen NL