Greiferspiel 2.Version Senkfunktion
Hochgeladen am 4.6.2010, 10:54 von uhen. 2 / 7
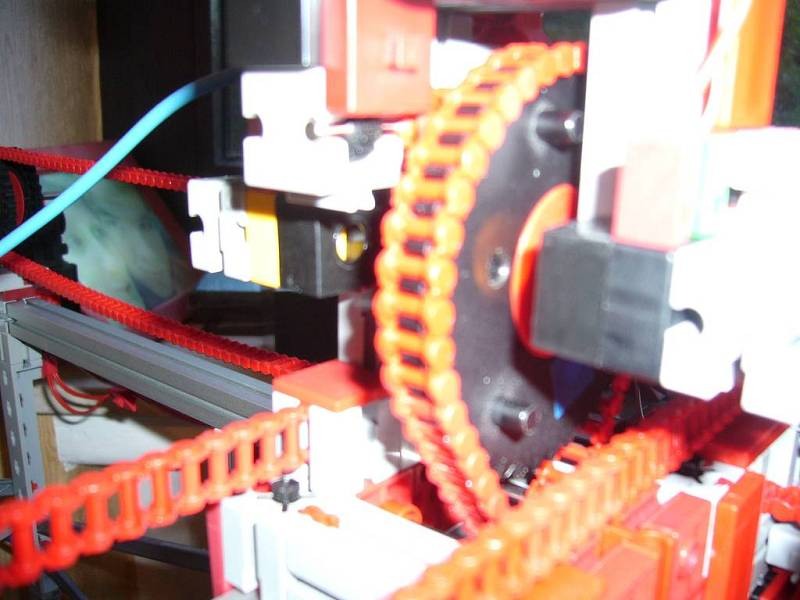
Der Greifer wird über die FT-Kette hinunter gelassen. Dadurch schwankt und dreht er sich nur noch minimal. Über die Lichtschranke erfährt das Robo-Interface, wann der Greifer unten angekommen ist. Das ist genau eine Umdrehung des Zahnrades. Ich habe allerdings die anderen zwei Löcher des Zahnrades mit Isolierband abgeklebt.