Gepäckträger mit Steuer-Elektronik
Hochgeladen am 19.2.2015, 18:44 von uffi. 2 / 9
Schlagworte: GY-86, Arduino, Nano, MPU6050, I2C, TWI, Servo, Bike, Motorrad, eBike.
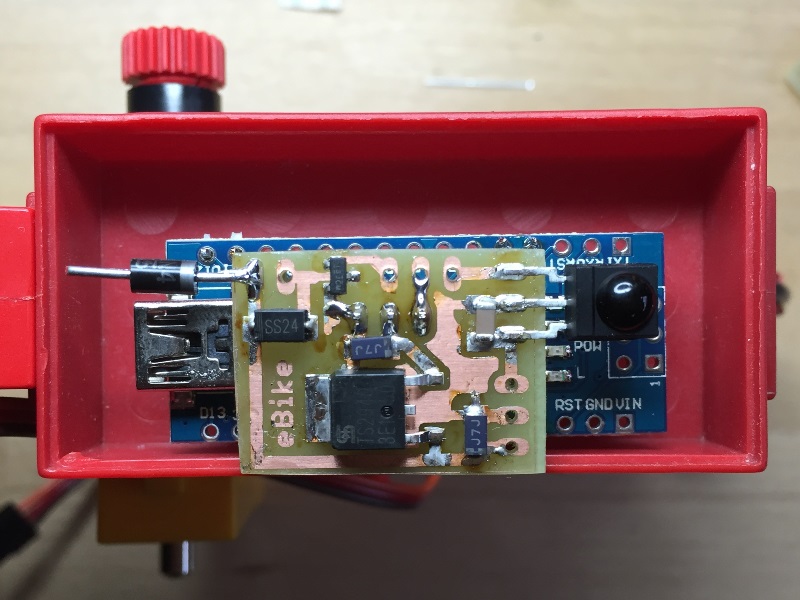
Hier sieht man den Gepäckträger (9V-Batteriehalter von FT), der die Elektronik zur Steuerung aufnehmen soll und die Elektronik bestehend aus:
- Arduino Nano (18 x 45 mm)
- GY-86 mit MPU6050 (3-Achs-Gyro + Beschleunigungssensor)
- Selbstbau-Board zum Ansteuern des Lenk-Servos und des Antriebsmotors Das GY-86 ist hier schon Huckepack auf den Arduino gelötet, Verbindung über I2C-Bus. Das Selbstbauboard hat einen 5V-Spannungsregler (unten im Bild) für den Servo-Motor, einen MOSFET und Freilaufdiode für den Antriebsmotor und einen Infrarot-Fernbedienungsempänger (Anschluß an einem Interrupt-Pin des Arduino). Der Servo-Motor und der Antriebsmotor werden mit 16-bit-PWM über Timer1 vom Arduino-Board gesteuert.
Defiant (20.2.2015, 07:27:06)
Nett, schon Gedanken über die Fusion der Sensoren gemacht? Z.B. über eine DCM?
uffi (20.2.2015, 11:20:53)
Die Fusion von Drehraten und Beschleunigungssensoren läuft über den DMP (Digital Motion Processor) auf dem Chip MPU6050, das ergibt einen sehr genauen und rauscharmen Kippwinkel des Bikes für die Regelung. Leider kann man da den Kompasssensor nicht mit einbinden, da der MPU6050 nur einen anderen Kompasstyp für die 9-DOF-Fusionierung unterstützt, als den auf diesem Board vorhandenen HMC-Typen. Ich hatte mir daher überlegt, die Kompassdaten in den AVR auszulesen (das geht, indem man den MPU6050 auf transparent bzgl. des I2C-Hilfsbusses schaltet) und für die PID-Regelung der Lenkung zu bverwenden, und zwar für den I-Anteil der Regelung.