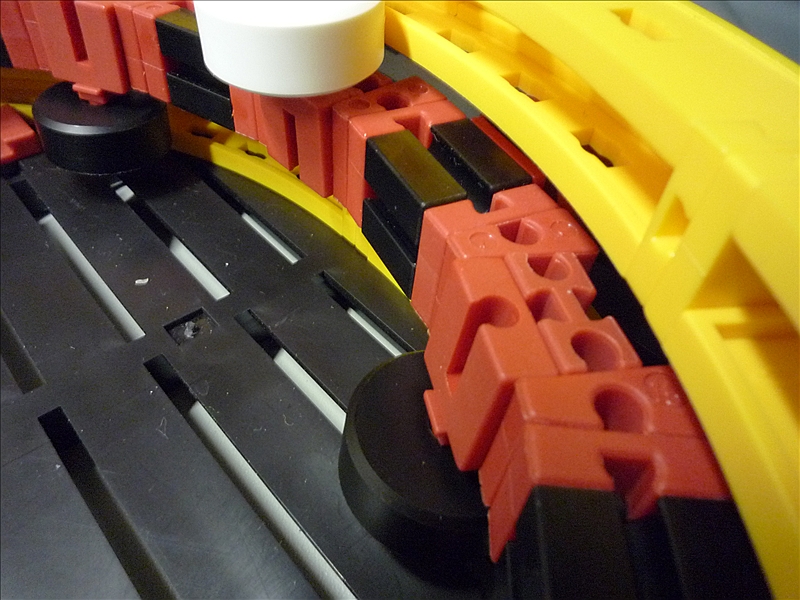
Nachbau Axiallager (7/7) Wälzkäfig, Teilansicht
Hochgeladen am 3.10.2008, 09:42 von Udo2. 7 / 15
Wer danach fragt, wo die Überdeckung zwischen dem Umkreis Ø204mm und den inneren Verbindungsstößen der Laufringe Ø202,5mm aufgefangen wird, findet sie hier bei den Zapfenverbindungen zwischen Radachse, BS 7,5 und Winkelstein 15°. Durch den Hebelarm der Achse ist sie an ihrem Zapfen am meisten beteiligt . Natürlich hat auch die Elastizität der beiden Laufringe und des Wälzkäfigs daran ihren Anteil. Laufeigenschaften: Wenn man mit zunächst vorsichtiger axialer Belastung den oberen Laufring dreht, findet man eine erstaunliche Laufeigenschaft des Axiallagers. Sobald die weißen und schwarzen Räder die Verbindungsstöße der Laufringbögen überqueren ist natürlich etwas Widerstand zu spüren. Weiterentwicklung: Meine Erkenntnisse am gerade aufgebauten Modell sind noch frisch und bedürfen ihrer ergänzenden Abklärung. Zu überlegen ist auf aktueller Grundlage zunächst inwieweit eine Einstellbarkeit des Umlaufdurchmessers auf den Innendurchmesser der Laufringe notwendig bzw. sinnvoll ist. Ich habe weiterhin vor dem Modellaufbau Lösungsansätze zur Versteifung des Wälzkäfigs in 3D im fischertechnik designer vorbereitet. Bei allgemeinem Interesse kann nach ihrer praktischen Beprobung über erste Erfahrungen berichtet werden. Vielleicht entsteht auch hier in der tfCommunity unter uns ft-Freunden eine rege Diskussion, denn es sollte nicht nur für Martin Roman [Remadus] als Konstrukteur und mich ein interessantes Thema sein. Dazu gehört natürlich auch der Antrieb zunächst eines solchen Drehtisches. Dazu habe ich zwei Ideen, die nach der Beprobung der Wälzkäfigversteifungen in mir abfragbar sind.
Udo2 (4.10.2008, 21:49:04)
Es zeigt sich sehr schnell, daß an den Verbindungen zwischen Winkelstein 15° und BS 7,5 sowie BS 7,5 und Radachse sich Veränderungen sowohl statisch als auch dynamisch einstellen. Gestern hatte die Konstruktion bereits ein Spiel zwischen Radialrolle und Bogenstückmitte. Da gibt mir Anlaß, meine bereits erstellen Lösungsansätze auf diese Erkenntnis zu modifizieren.
Udo2 (6.10.2008, 20:27:41)
Hallo Miteinander, konnte heute erste Probeläufe mit dem weiterentwickelten Laufkäfig des Axiallagers mit Motorantrieb durchführen. Die Ortslage des oberen Lauringes ist nach meiner Einschätzung jetzt stabil und erlaubt den Direktantrieb an einer Kette am Umfang des oberen Laufrings. Da mir noch ein paar Teile fehlen um Provisorien an der Kettenhalterung zu beseitigen, gibt es Fotos Anfang kommender Woche. Grüße euch, Ingo