Selektor hinten seite
Hochgeladen am 4.6.2006, 12:56 von jmn. 3 / 7
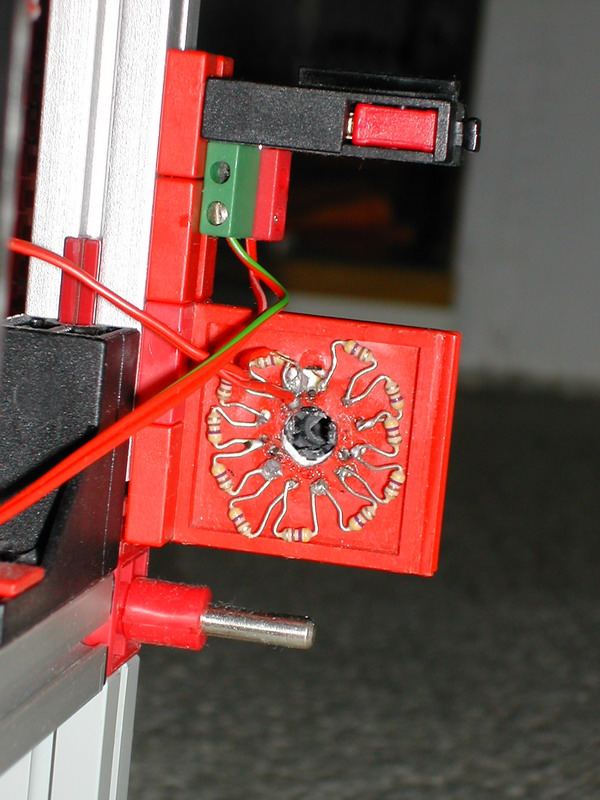
Es gibt 12 Widerstande. Jede von 470 Ohm. Mit jede Schaltung kommt 470 Ohm dazu. Zb: nummer 1 hat 470 Ohm, nummer 2 hat 940 Ohm etc. Dieser wert wir dan im Interface gelesen und wann Start gepresst wird, dan dreht der Schrank erst nach sein RESET position und dreht sich dan nach Plank 2 wann der Selektor auf 2 geschaltet ist. Leider ist es mit die Widerstande nicht immer 100% damit denn Schrank nicht den Richtigen Plank nach vorne drehen kann. Das muss ich noch verbessern. Auch will ich auch das dieser Schrank ein “memory” funktion hat. Zb: Plank nummer 3 steht vorne und denn selektor wird auf 5 gedreht, dann will ich das der Schrank gleich nach 5 geht und nicht erst rund dreht zum RESET und dann nach 5. Ich bin aber noch nicht so weit mit den RoboInterface.
schnaggels (6.6.2006, 10:37:15)
Du prüfst in RoboPro sicher, ob der Wert in einem bestimmten Bereich ist. Bis 705 Ohm (470 + 470/2) Stellung 1, bis 1175 Ohm Stellung 2 u.s.w würde ich mal probieren.
Zum Merken: Wenn du einen 2. mechanisch über das Interface angetriebenen Drehschalter nimmst, kannst du dort die aktuelle Position speichern und auch nach einem Stromausfall wieder auslesen.
Gruß, Thomas
jmn (6.6.2006, 12:59:06)
Hallo Thomas,
Das erste habe ich gemacht. Im stand 1 ist es ca 470 Ohm, 2 hat auch seine eigene Wert usw. Diese Werte habe ich “programmiert”.
Das mit denn Position speichern, verstehe ich nicht ganz. Hat warscheinlich auch mit meine Erfahrung mit RoboPro zu tun.
Arjen
Sannchen90 (8.6.2006, 18:24:21)
Ich verstehe den ganzen Schalter nicht, soweit ich weiß läuft doch ein Paternoster immer rundum und hält nicht an. Kann man mit dem Schalter jetzt die Geschwindigkeit steuern oder wie oder wo er anhält?
jmn (9.6.2006, 12:59:33)
Paternoster gibt es in verschiede Formen. Fur Personen und fur Sachen. Eins fur Personen halt nicht an und geht immer durch. Eins fur Archiv kann mann selber wählen was mann sehen will.
Mit den Selektor wählt mann welche Plank mann sehen will. Dreh denn Selektor auf z.B. nummer 3 und der dritte Plank kommt nach vorne und halt dan an.
Sannchen90 (9.6.2006, 22:01:22)
Danke für die Erklärung.
schnaggels (24.8.2006, 11:48:16)
Ich meinte du speicherst die Position mechanisch mit einem 2. Drehschalter, der über einen Motor angetrieben wird. Es würde aber reichen, die Position in einer Variable in RoboPro zu speichern. Das reicht mindestens bis zum Stromausfall :)
Zu den Widerständen: Du musst immer auf einen Bereich prüfen! Also Wert zwischen 450 und 490 => Position 1
Thomas