KnickArm_01
Hochgeladen am 11.12.2011, 13:57 von con.barriga. 85 / 216
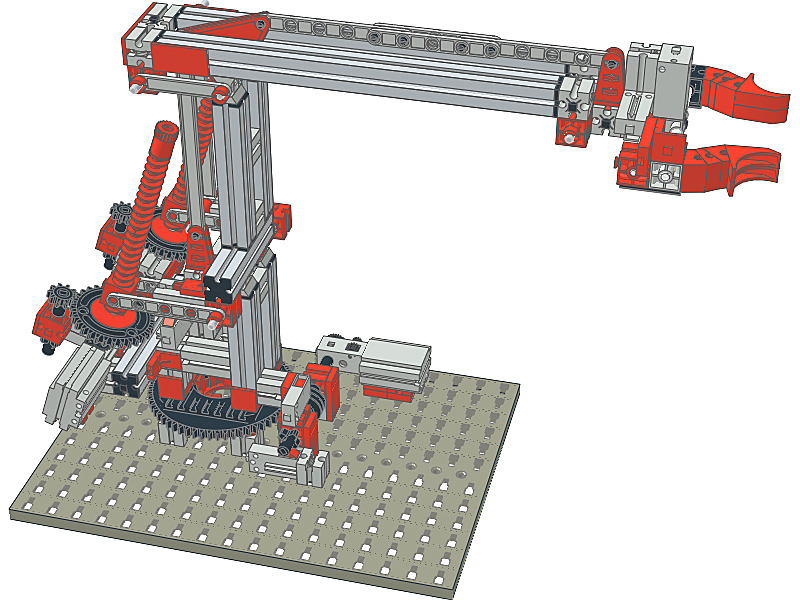
Habe mal versucht, die Genauigkeit des guten alten Knickarmrobos ohne die Lichtschranken-Sensoren zu erhöhen. Geht auch ganz gut, wenn bei Richtungswechsel der Motoren per Software ein wenig “nachgeholfen” wird.
Gruß con.barriga
Triceratops (12.12.2011, 03:12:47)
Hallo
Ist das Absicht, oder warum sind die Greifklammern verkehrt herum montiert? Übrigens: genau diesen Kasten habe ich mir damals auch gekauft.
Gruß, Thomas
Udo2 (12.12.2011, 17:11:45)
Hallo Werner, Der Trainingsroboter hatte meines Wissens 32 Impulse/Umdr. Hier kommst du max. auf 3x4x2=24 Impulse/Umdr. ? Gruß Ingo
con.barriga (13.12.2011, 18:37:33)
@Thomas So montiert können Gegenstände mit geraden Flächen besser gegriffen werden.
@Udo In der Beschreibung habe ich mich nicht klar genug ausgedrückt. Ich wollte nicht sagen, dass durch die Änderungen die Genauigkeit höher als bei dem ursprünglichen Modell ist, sondern nur besser als bei anderen Variationen, die ohne die Lichtschranken auskommen.
Gruß, Manfred