Dalen van Libelle met vleugelhoek-verstelling via RoboPro + TX in download-modus met vragen ?!..
Hochgeladen am 26.7.2014, 20:51 von peterholland. 36 / 39
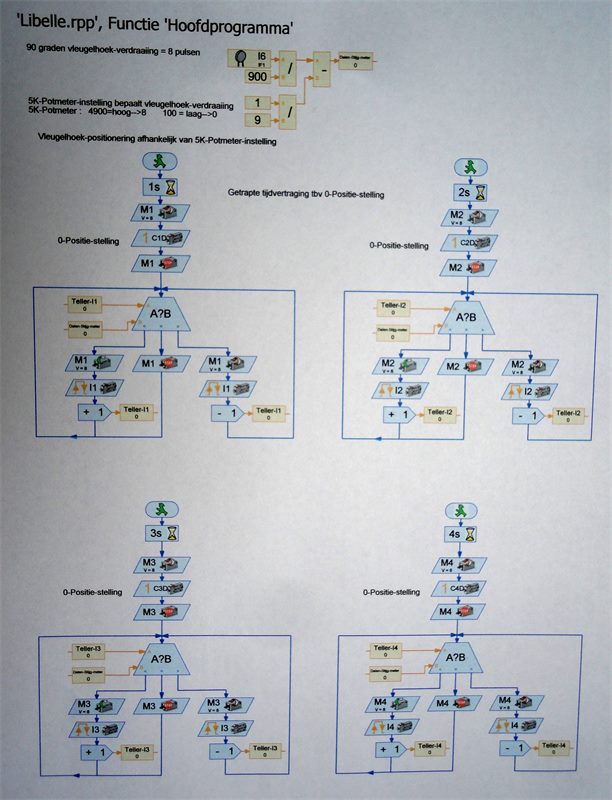
Het draaien van de vleugelhoek bepaalt de stuwrichting. De vleugelhoek-verstelling per vleugel vindt plaats door XS-motoren (137096) via een RoboPro-programma door de TX-computer-interface.
Voor herkenning van de 0-Positie gebruik ik reed-sensoren met een buitendiameter van 3,8mm die direct ín een fischertechnik-bouwsteen geschoven kan worden.
Als Pulsteller gebruik ik normale minitasters 37783. Een veranderende Potmeter-weerstandswaarde zorgt voor een vleugelhoek-verstelling om de vereiste stuwrichting te blijven houden.
Voor een betrouwbare automatische programma-start bij het inschakelen van de TX (in download-modus) blijkt een getrapte tijdvertraging noodzakelijk tbv de 0-Positie-stelling van elk van de 4 vleugel-processen.
Dit blijft merkwaardig en roept vragen op !?…… Hoe kan dit worden verklaard ?