Ballroboter (b)
Hochgeladen am 9.2.2008, 12:07 von equester. 2 / 4
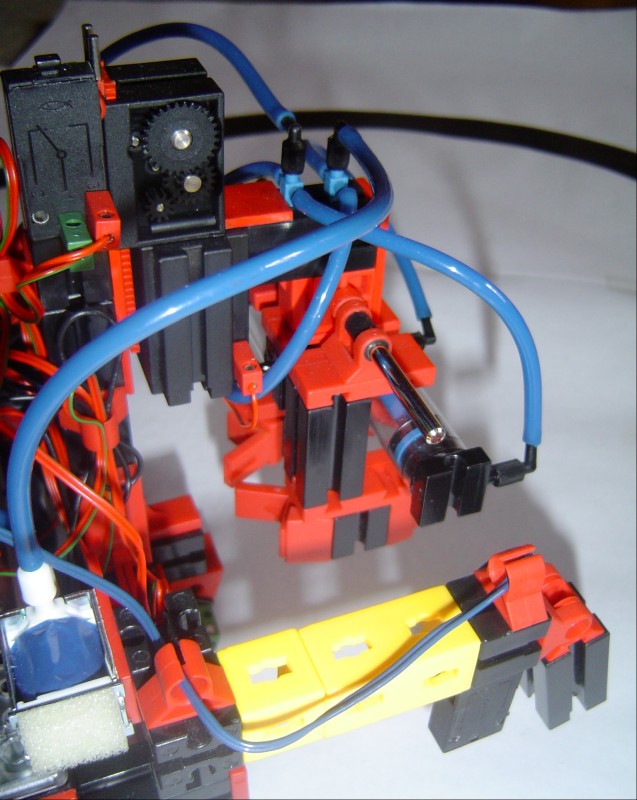
Hier sieht man den Greifmechanismus und den Tastsporn, mit dem der Roboter erkennt, wenn er bei den Stationen ankommt.
Hier sieht man den Greifmechanismus und den Tastsporn, mit dem der Roboter erkennt, wenn er bei den Stationen ankommt.