Ballroboter
Hochgeladen am 9.2.2008, 12:07 von equester. 1 / 4
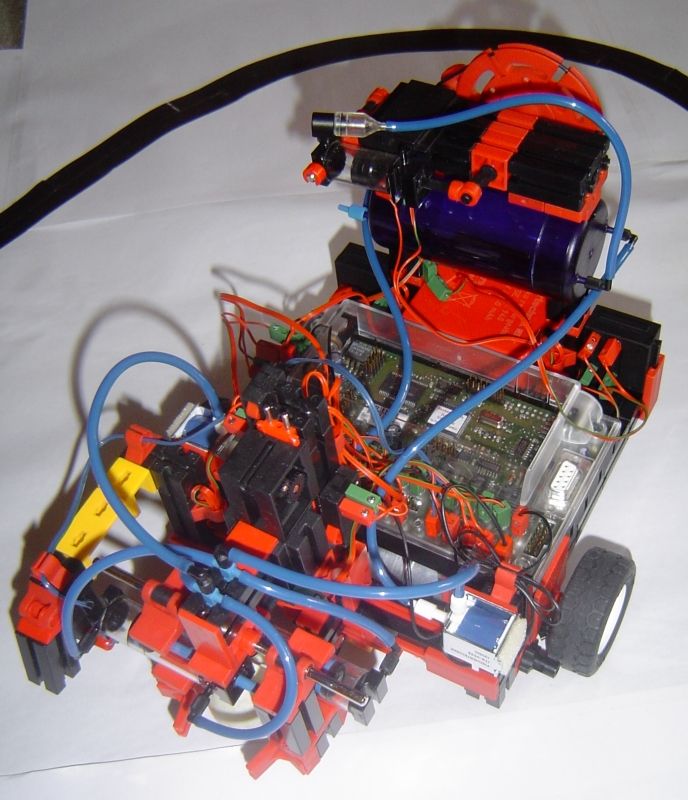
Dies ist das Clubmodell Nr. 22 - “Mobile Pneumatic Robot” aus der News 01/03. Ich habe den Ballroboter über RoboPro so programmiert, dass er bei einer Station immer einen Tischtennisball aufnimmt, einer schwarzen Linie zur Station 2 folgt, dort den Tischtennisball in einen “Korb” fallen lässt, umkehrt und wieder einen Ball holt,…