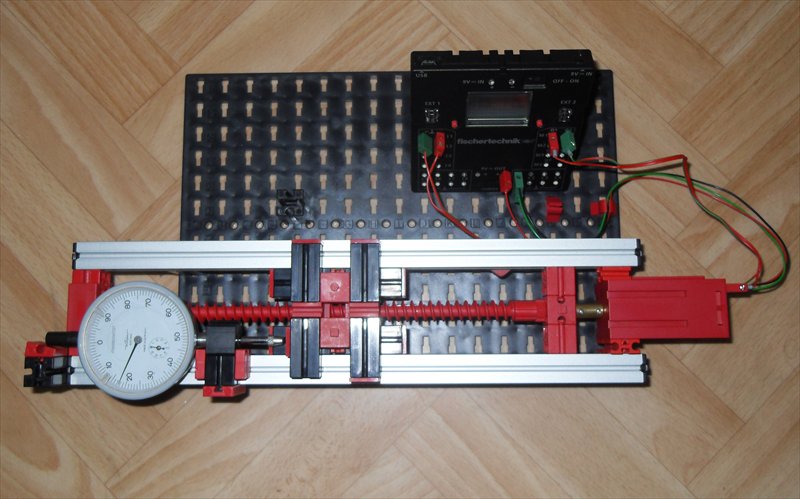
Versuchsaufbau zur Ermittlung der Positioniergenauigkeit
Hochgeladen am 29.1.2011, 21:53 von TST. 7 / 10
Ich habe hier einen Versuchsaufbau gemacht um die Genauigkeit der Encodermotoren am TX und am Robo Interface in Verbindung mit meinem Inpulsewandler zu ermitteln. Hier die Ergenisse:
- Versuchsreihe: Fahren vom Referenzpunkt ( Taster ) auf Endposition. Weg: ca 50mm ( gefahren wurden 10 Wege )
TX mit Encoder durchschnittliche Abweichung: 0,05mm bester Wert: 0 schlechtester Wert: 0,13mm
Robo mit Impulswandler ( 0 und 1 Impulse ausgewertet ) durchschnittliche Abweichung: 0,15mm bester Wert: 0,04 schlechtester Wert: 0,30mm
- Versuchsreihe: Wiederholgenauigkeit Fahren vom Endpunkt um ca 25mm zurück und dann wieder auf Endposition ( gefahren wurden 10 Wege )
TX mit Encoder durchschnittliche Abweichung: 0,05mm bester Wert: 0 schlechtester Wert: 0,09
Robo mit Impulswandler ( 0 und 1 Impulse ausgewertet ) durchschnittliche Abweichung: 0,17mm bester Wert: 0,06mm schlechtester Wert: 0,35mm
Wie genau die Powermotoren in Verbindung mit dem Impulserad und Taster sind habe ich nicht mehr ermittelt, wäre sicherlich als Vergleich auch interessant gewesen.
Die Encodermotoren in Verbindung mit dem TX sind echt genau.
Die Werte von den Econdermotoren in Verbindung mit dem Impulswandler und dem Robo Interface finde ich auch schon sehr gut.
Was meint Ihr zu den ermittelten Werten?
Udo2 (30.1.2011, 00:19:34)
Hallo Andreas, deine Meßvorrichtung ist interessant. Ich nehme an, das du am Schlitten unter den beiden BS7,5 zwei Schneckenmuttern zum mechanischen Spielausgleich angeordnet hast. Interessant wäre noch zu wissen, wie in der Steuerung die Impulszählung erfolgt. Nun wird hier der Motor allerdings wenig belastet. Interessant wären aber mal Werte bei einer lastabhängigen Stromaufnahme nahe 250 mA sowie schwankender Last … Gruß, Ingo
TST (30.1.2011, 08:18:00)
Hallo Ingo
Was meinst du mit " wie in der Steuerung die Impulszählung erfolgt " ?
MFG
Andreas
Stefan Falk (30.1.2011, 13:19:28)
Saubere Arbeit, Respekt!
Gibt es denn beim Hin- und Herfahren auch mit dem TX aber nicht immer mal kumulative Fehler, weil durch Nachlaufen oder so Impulse auch mal in die falsche Richtung gezählt werden? Oder ist das wirklich für Dauerbetrieb “sauber”?
Gruß, Stefan
Janft (30.1.2011, 13:26:18)
das ist eine tolle Idee
MfG
Janft
remadus (30.1.2011, 18:58:31)
Hallo,
super, ein sehr schöne, systematische Untersuchung. Endlich wieder jemand, der echte Zahlen heranschafft.
Die ganze Genauigkeit dieser Encodermotoren erschöpft sich im Getriebespiel und darin, dass der Encoder die Drehrichtung nicht selbst auswertet. Richtig genau wird die Sache erst, wenn das Getriebe vorgespannt wird und garantiert kein Impuls verlorengehen kann oder falsch herum gezählt wird.
Sonst helfen nur echte Inkrementalzähler zusammen mit Quadraturdecodern. Tja.
Als dann Remadus
Udo2 (31.1.2011, 11:44:18)
Hallo Andreas (TST), du hast dazu sicher ein Steuerprogramm. Sei so nett und lege das mal offen. Dann hätte das Kommentieren dazu eine sachliche Basis. Hallo Martin (Remadus), dein Kommentar bestätigt kurz und prägnant, was ich im Forum dazu schon mal versucht habe zu kommentieren. Deshalb sind für mich auch Meßwerte bei einer Stromaufnahme nahe an der Grenze 250 mA sowie bei schwankender Last von Interesse. Letzteres dürfte die Werte verschlechtern. Wer schon mal einen solchen Motor an Zapfen und Stator fixiert vorsichtig an der Magnetscheibe und damit den Rotor “bewegt” hat wird das Kommentierte verstehen. Im Gespräch sollen ja nach wie vor auch sein 2-polige ft-Encodermotoren, die man dann wahlweise 2-polig (2 an einen TX) oder 1-polig (4 an einen TX) betreiben könnte. Es fehlt halt noch der praktische Beweis der Notwendigkeit seitens der ft-Fans, der ft dann endgültig überzeugt … Gruß, Ingo