Schrank 4 Schublade 5 verdeckte Lage
Hochgeladen am 15.1.2022, 19:16 von Website-Team. 42 / 44
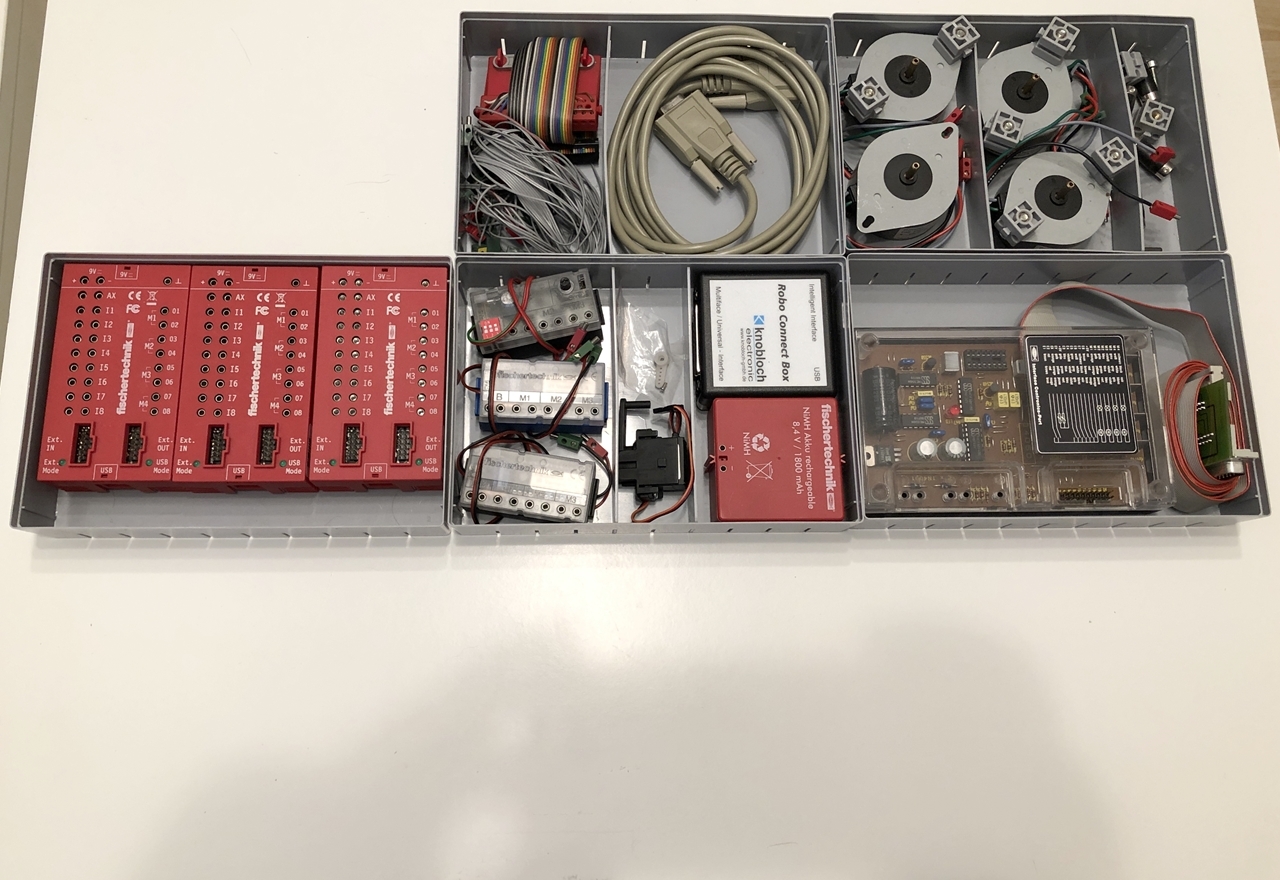
Ein Ur-Parallel-Interface, die Robo Connect Box dafür, ein Akku, Servo, IR-Empfänger, Extensions fürs Robo Interface, Schrittmotoren, USB-Kabel, Parallel-Interface-Anschlusskabel.