Schrank 4 Schublade 5 verdeckte Lage
Hochgeladen am 7.5.2018, 22:44 von Stefan Falk. 37 / 39
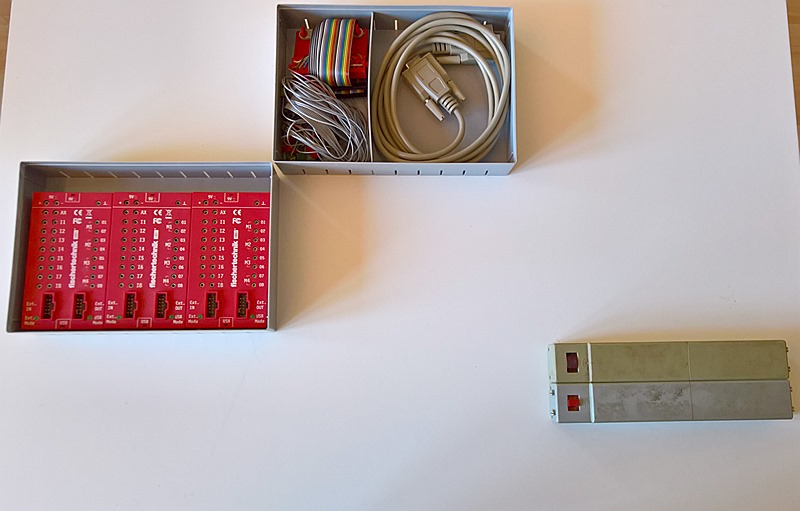
Robo-I/O-Extensions, V24-Kabel, Flachkabel für das Parallelinterface und zwei Ur-Batteriestäbe, die sich unterhalb der kleinen roten Batteriehalter (siehe voriges Bild) befinden.