Bionische Greiffinger (Festo) + Fischertechnik
Hochgeladen am 24.8.2012, 20:58 von peterholland. 5 / 7
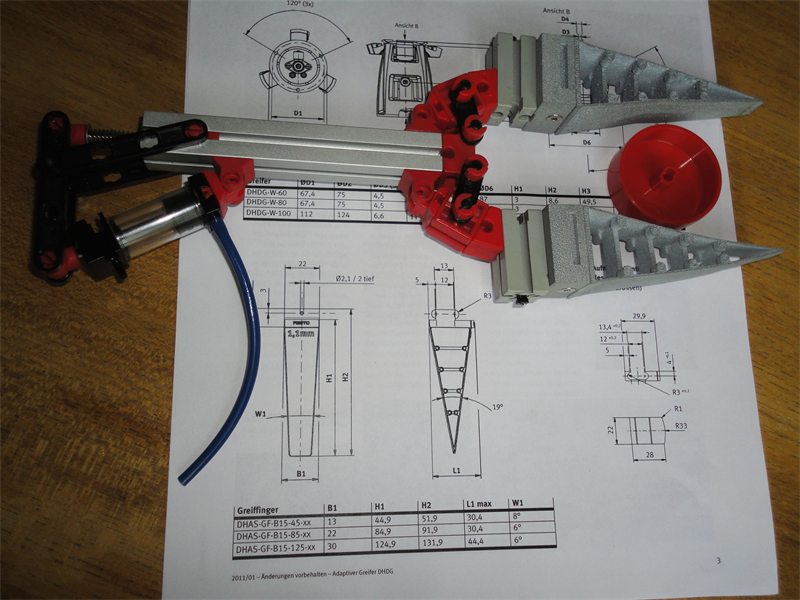
Der adaptive Greifer funktioniert wie einer Fischschwanzflosse. Zwei flexible Bänder laufen wie ein Dreieck in der Spitze zusammen. Zwischenstege in regelmässigen Abständen sind über Gelenke mit den Bändern verbunden. Durch diesen flexiblen, aber festen Verbund passen sich die Greiffinger der Kontur eines Werkstücks an.
Der bionische Greifer (Festo) wirdt im 3D Selective Laser Sintering-Verfahren aus Polyamidpulver hergestellt.
peterholland (24.8.2012, 22:19:28)
Interessante Weblinks und Video gibt es unter :
http://www.festo.com/cms/de_corp/9617.htm
http://www.youtube.com/watch?feature=player_embedded&v=90cXfaFM4O8
http://www.youtube.com/watch?feature=player_embedded&v=UHhlX49JooA
http://www.festo.com/PDF_Flip/Highlights_2012/DE/index.html#/8/
Grüss,
Peter Poederoyen NL
chef8 (25.8.2012, 19:28:17)
Ik heb de filmpjes bekeken , dit zijn echt slimme vingers.
vr gr Ruurd
chef8 (25.8.2012, 23:29:12)
Nu zie ik het pas de bediening van de vingers door het al profiel slim!!!!
vr gr Ruurd
chef8 (25.8.2012, 23:49:23)
Nu zie ik het pas de bediening van de vingers door het al profiel slim!!!!
vr gr Ruurd
Harald (7.9.2012, 21:47:11)
Klasse! Damit könnte man auch Bälle von einer Station zur nächsten übergeben, wie das gerade für die ftconvention diskutiert wird.
Gruß, Harald
peterholland (29.3.2014, 09:27:50)
Festo - MultiChoiceGripper Er kombiniert paralleles und zentrisches Greifen ohne aufwendigen Umbau. Seine adaptiven Finger mit Fin Ray®-Stuktur passen sich flexibel an die unterschiedlichsten Formen an. https://www.youtube.com/watch?v=u4ZScJsaepg&feature=em-uploademail-ctrl
peterholland (5.12.2014, 18:42:19)
Festo- Gripper with an integrated cutting tool with fingers that are based on the Finray principle can be seen on :
The use of camera’s during the project with different concepts for fruit and obstacle detection, ripeness determination and localisation and concepts to reach, grasp and detach fruit were investigated.
http://www.crops-robots.eu/index.php?option=com_content&view=article&id=22&Itemid=22
Nice examples to simulate these technics with Fischertechnik + the TXT !!!!!…..
Peter Poederoyen NL