Greifzange für Trainigsroboternachbau - Aktueller Stand
Hochgeladen am 10.4.2009, 07:57 von charly. 4 / 14
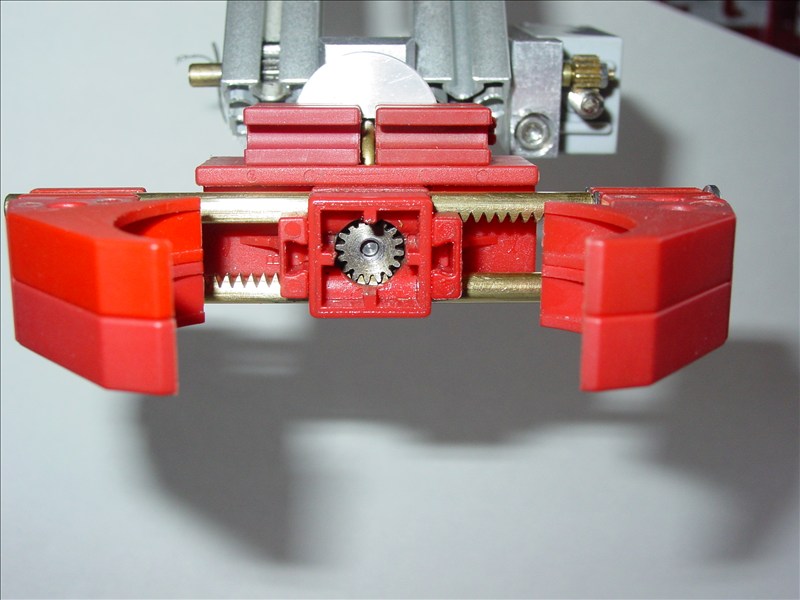
Für meinen Trainingsroboter-Nachbau tüftle ich schon lange an einer kompakten Greifezange, hier jetzt die Bilder zum aktuellen Stand. Die Backen werden durch Drehen des Zahnrad Z16 im modifizierten Baustein 15 mit Loch parallel verfahren. Dies funktioniert mittels Seilzug/ Feder von hinten.
schnaggels (17.4.2009, 23:19:40)
Wow, einfach nur genial was du so baust! Tolle feinmechanische Ergänzung :) Im Gegensatz zu anderen Fans teile ich übrigens deine Meinung, ft ist auch für mich ein geniales (Basis) Konstruktionssystem das super durch Fremd-Elektronik oder -Mechanik ergänzt werden kann um eigene Vorstellungen besser umzusetzen :)
Gruß Thomas
speedy68 (17.4.2009, 23:46:55)
Hallo, ich halte mich zwar auch bis auf wenige Ausnahmen an das „ft Reinheitsgebot“, aber jeder hat ja das Recht, es mit Fremdteilen zu erweitern bzw. zu verbessern. Und wenn es dann noch so genial, wie in diesem Fall gemacht wird, gefällt es mir dann umso besser. Gruß Thomas