Versuch Encoder TX
Hochgeladen am 31.1.2011, 19:08 von TST. 9 / 10
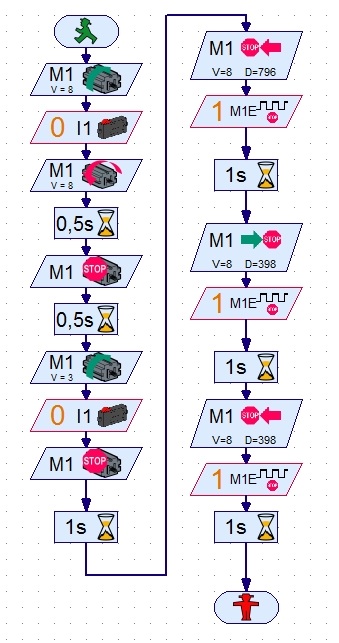
Hier wie gewünscht das Testprogramm zum Anschluß des Encodermotors am TX Controler.
Udo2 (1.2.2011, 20:20:26)
Hallo Andreas, Danke! Mein ft-Arbeitsplatz zieht wegen Vergrößerung um. Ich melde mich später. Gruß, Ingo
Udo2 (3.2.2011, 18:40:48)
Hallo Andreas (TST), da ich mit meinem Alus blank (alle verbaut) bin, kann ich leider deinen Meßaufbau praktisch nicht 1:1 nachvollziehen. Wenn ich dein Programm richtig verstanden habe, macht es bis zum zweiten Zeitelement Referenzfahrten an/um Taster I1 um dann 796 Impulse = 168,9 mm vor, die Hälfte zurück und diese wiederum vorzufahren zur Meßuhr. Damit werden zwei Richtungsänderungen gefahren. Wenn du dir die Kommentare von Stefan Falk und Remadus durchliest erkennst du sicher, daß zwei Richtungsänderungen zu wenig sind. Vielleicht kannst du die 398 Impulse mittels einer Schleife je Meßfahrt mal mindestens 10x oder auch öfter fahren. Dann wird die Aussage zur Genauigkeit des einpoligen Encodermotors aussagefähiger. Es geht hierbei denke ich mal vordergründig um die Frage zukünftiger ein- oder zweipoliger Encodermotoren und nicht um das “Anzweifeln” deines Impulsteiler-Bausteins. Gruß, Ingo
Udo2 (3.2.2011, 19:03:18)
Ergänzung: Ich halte es nach wie vor für wichtig zu erfahren, wie der Encodermotor bei einer Belastung bis zur Stromaufnahme 250 mA und schwankender Last arbeitet. Vielleicht ist hier an der Kupplungsnabe (Schneckenseite) ein kleines offenes Zahnrädergetriebe (Übersetzung ins Schnelle) möglich, daß zur Erhöhung der Belastung des Motors führt. Mit Gleitlagern BS15mB kommt hier die schwankende Last von allein durch das Lagerspiel. Mit Wälzlagern werden die Schwankungen dann geringer … Gruß, Ingo
Udo2 (3.2.2011, 20:13:39)
Eine ham wa noch: Ich war gerade beim Geschirrspülen :o) Dabei fiel mir noch ein, daß entgegengesetzte Richtungsänderungen im Meßversuch nicht geradzahlig sein sollten …
TST (3.2.2011, 20:53:03)
Hallo Ingo
Um wirklich genau festzustellen wie genau die Encodermotoren sind würde ich folgendes vorschlagen:
-
Aufbau einer Lineareinheit mit Kugellumlaufspindel um das Spiel und auch die bei den ft Schnecken sicherlich vorhandenen Steigungsfehler zu eleminieren.
-
Anbau eines Linearmeßsystems wie z.B. Linear Scale von Mitutoyo ( habe ich an meiner Drehbank) um eine sehr präzise Absolutmessung durchzuführen.
Damit ließe sich sicherlich feststellen wie genau die Motoren arbeiten. Leider fehlt mir aber für so einen Versuchsaufbau die Zeit.
MFG
Andreas
Udo2 (3.2.2011, 22:41:16)
Hallo Andreas, absolut gesehen hast du natürlich Recht. Ich dachte dabei allerdings weniger an qualitativ hochwertige Fremdkomponenten sondern vielmehr an Aufbauten mit dem ft-System. Da in einem solchen “Meßaufbau” wie in deinem stets der gleiche Weg zurückgelegt wird, lassen sich “Unregelmäßigkeiten” bei der Impulszählung insbesondere bei Richtungsänderungen über die Wegdifferenzen durchaus erkennen … Gruß, Ingo
Udo2 (3.2.2011, 23:11:19)
… ich habe dazu noch etwas eMail-Text von RoboProEntwickler vom 15.01.2011 gefunden, den ich hier mal zitiere: “Die eingebauten Elemente sind zwar auch nicht perfekt, aber in der Regel ist die Abweichung weniger als 0,1 Impulse pro Fahrbefehl. Ursprünglich sind die Motoren ja für Fahrroboter gemacht worden und da ist der mechanische Schlupf um ein Vielfaches größer”. Damit focusiert sich unsere Aufmerksamkeit im praktischen Einsatz auf Richtungsänderungen, Lastgrenzbereiche (Stromaufnahme bis 250 mA) sowie Lastschwankungen. Die letzten beiden Komponenten sind deshalb interessant, weil sie durch ein Getriebe 25:1 mit mechanischem Spiel gekoppelt sind.
Udo2 (5.2.2011, 10:41:43)
… mit den Komponenten sind hier gemeint der Rotor (Lastgrenzbereich) und der Ausgangszapfen (schwankende Last) …