Versuch Encoder Robo
Hochgeladen am 31.1.2011, 19:08 von TST. 8 / 10
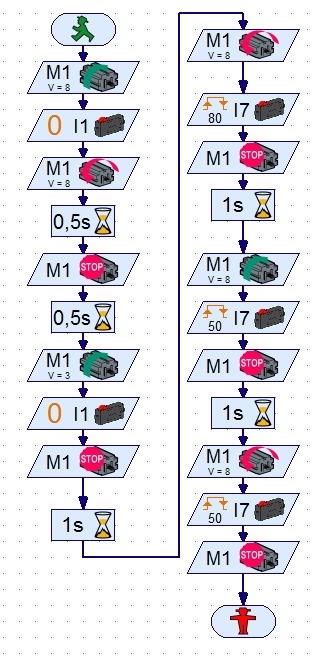
Hier wie gewünscht das Testprogramm zum Anschluß des Encodermotors an das Robo Interface mit meinem Impulswandler.
Hier wie gewünscht das Testprogramm zum Anschluß des Encodermotors an das Robo Interface mit meinem Impulswandler.