Pistenbully 2
Hochgeladen am 5.10.2014, 13:51 von Dirk Fox. 3 / 3
Harald (6.10.2014, 19:31:47)
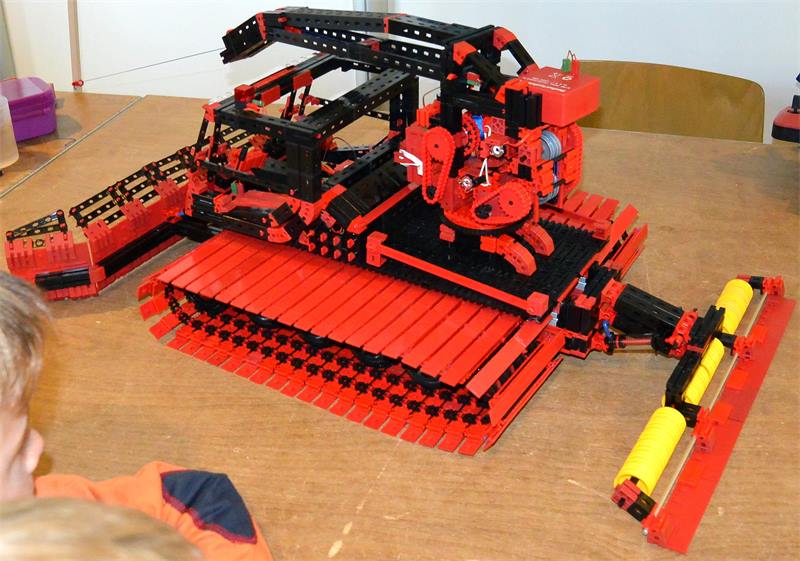
Dagegen kommt mein kleiner nicht an: superbreite Ketten, funktionierender Antrieb, und ordentlich Grips verbaut!
Der Seilwindenaufbau ist ein völlig eigenständiges Modell, mit Regelung für Seilspannung und -richtung, das von dem Geschehen unterhalb vom Drehkranz rein gar nichts weiß und nur auf das Seil reagiert. Ein paar Takte Erklärung plus Detailfotos kommen hoffentlich noch … ?
Gruß, Harald
peterholland (28.3.2015, 14:12:47)
Eine sehr interessante Beschreibung im ftpedia-2015-1 mit Historie und Technik und der Aufbau zweier ft-Pistenraupen !
Aufbau + steuerung der Winde ist aud seh interessant. Entsprechend der Seilspannung wird der Antriebsmotor der Seiltrommel, sowohl in der Geschwindigkeit als auch in der Drehrichtung, gesteuert. Die Seilspannung wird über die Wippe (Abb. 24) mit dem Umlenkrädchen gemessen, das sich um die Achse mit dem Potentiometer drehen kann. Als Gegenkraft dient ein Gummiband.
Die Regelung der Spillköpfe und der Trommel erfolgen unabhängig voneinander.
peterholland (28.3.2015, 14:16:18)
Wäre es möglich das RoboPro-Programm zu uploaden ?
Grüss,
Peter Poederoyen NL
ft-familie (4.4.2015, 19:58:38)
Hallo Peter,
die jetzige Version habe ich hochgeladen. Es ist die Version von der ft-Convention.
Eigentlich wollte ich die Regelung nochmals optimieren, aber mit guter Parameterwahl läuft diese Version eigentlich schon ganz ordentlich.
Erik hat schon den Plan für dieses Jahr vorgegeben, da bleibt für Optimierungen gerade keine Zeit.
Normalerweise müsste jetzt der Link zum Programm kommen, aber nicht an Ostern :-)
Frohe Ostern und eine erfolgreiche Eier-Suche.
Erik und Jörg
peterholland (5.4.2015, 12:50:13)
Hallo Erik + Jörg, (ft-familie)
Herzlichen Dank für der Link zum interessanten Programm “Pistenbully-Windensteurung.rpp”. Das hat man gut überdacht…………
Das Universal-Unterprogramm “Regelung” sieht kompliziert aus……
Bei zu hoher Seilspannung wird die Geschwindigkeit des Motors beim Abwickeln stufenweise erhöht, beim Aufwickeln erniedrigt. Ist beim Aufwickeln trotz Reduzierung der eschwindigkeit bis zum Stillstand die Seilspannung immer noch zu hoch, wechselt die Laufrichtung, d. h. es wird abgewickelt.
- Wäre es möglich die verschiedene Parameter im Universal-Unterprogramm “Regelung” zu erklären,, damit es möglich ist das Funktionieren zu verstehen und selbst die richtige Parameter zu wählen ?
Die Winde ist für andere (neue)Modellen auch sehr interessant !……….
MWert = ?
MAbw =
PMult =
PTeiler =
POffset =
MMult =
MTeiler =
MOffset =
add =
Pmax =
Mmax =
Offset =
Time =
Frohe Ostern !………
Grüss,
Peter Poederoyen NL
peterholland (12.4.2015, 16:26:58)
Hallo Erik + Jörg, (ft-familie)
Ich habe selbst auch (nur) eine Winde gebaut zum Programm “Pistenbully-Windensteurung.rpp”.
Es funktioniert “gut” bei eine Parameterwahl. ……aber es bleibt “Jo-jo-en”.
Was ist der wichtstigste Paramater zum Jo-Jo- Minimalisierung ?
Gruss,
Peter Poederoyen NL
ft-familie (16.4.2015, 21:55:35)
Hallo Peter,
entschuldige die verspätete Antwort.
Aber meine Umräumarbeiten haben länger als erwartet gedauert. Eigentlich hab ich meinen Desktop (den mit RoboPro) nur austauschen wollen, dann alle Kabel im Büro bis in den Keller neu installiert und die Regale, wenn man schon dabei ist, auch noch ausgemistet. So, jetzt geht’s endlich wieder ans Fischertechnik.
Die Parametererklärung werde ich noch ins Robo-Pro-Programm unter Beschreibung ergänzen und dann nochmals hochladen. Dann findet man sie auch immer gleich.
Welche Parameter wichtig sind, ist eine gute Frage.
Die Mindestabweichung der Potiwerte (MAbw) sollte groß genug sein, der Offset des Motors genügend hoch und die maximale „Geschwindigkeit“ des Motors (Pmax und Mmax) nur so hoch, wie man als höchste Last den Motor wirklich braucht.
Das Jo-Jo-en bei einer einzelnen Winde lässt sich nahezu beseitigen. Bei der Winde mit anschließendem Spill-Antrieb wird durch gegenseitige Beeinflussung meist ein Schwingen nahe dem Stillstand bleiben.
Für mich ist der wichtigste Parameter für eine einwandfreie Funktion die Leichtgängigkeit der Poti-Welle. Die Befestigung des Potis gegen verdrehen darf die Reibung möglichst nicht erhöhen. Und mit der Vorspannung des Gummibandes und der Zugrichtung lässt sich der Aufbau optimieren. Zu geringe Beweglichkeit, oder noch schlimmer ein Hakeln, lässt sich durch die Regelung nicht mehr kompensieren.
Ich hab noch ein paar Ideen, wie man die Regelung noch erweitern könnte. Ich probiere das mal in den nächsten Tagen aus. Wenn es besser funktioniert, lade es hoch und gebe Bescheid.
Weitere Fragen sind natürlich auch immer willkommen.
Gruß
Jörg
peterholland (17.4.2015, 14:59:02)
Danke…..
peterholland (7.5.2015, 22:16:02)
Danke für die Beschreibung der Inputs beim Programm !
Gruss
Peter Poederoyen NL
Poti (Po): Messwerteingang MWert (MW): Ist der gewünschte Mittelwert MAbw (MA): Mindestabstand vom gewünschten Mittelwert, damit die Abweichung berücksichtigt wird
Die Abweichung ergibt sich aus Poti - MWert. Bei positiver Abweichung vom Mittelwert wird die Abweichung mit PMult multipliziert, mit PTeiler dividiert und POffset dazuaddiert und ergibt die Variable Änderung. Bei negativer Abweichung vom Mittelwert wird die Abweichung mit MMult multipliziert, mit MTeiler dividiert und MOffset dazuaddiertund ergibt die Variable Änderung (Unsymmetrische Auslegung möglich)
Bei Add = 1 wird bei der Winde oder dem Spillkopf verwendet, damit der Geschwindigkeitswert um die Variable Änderung erhöht oder erniedrigt wird. Bei Add = 0 wird die Variable Änderung als Geschwindigkeitswert verwendet, z.B. direkt für die Drehung der Winde.
PMax beschränkt den Geschwindigkeitswert bei positiven Werten, MMax das Maximum bei negativen Werten.
Offset erhöht die den Geschwindigkeitswerte, sowohl in positiver als auch in negativer Richtung.
Time gibt die Zeit * 10 ms an, in der die Regelschleife wiederholt wird.
Aus gibt die Motoransteuerung aus.