Gesammtansicht (0.9)
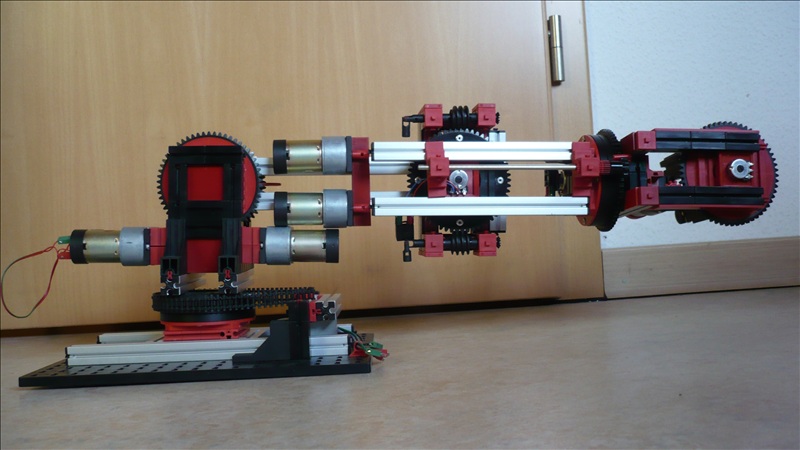
Hochgeladen am 22.4.2009, 17:56 von Severin. 8 / 8
Hier sieht man Wunderschön die extreme Belastung von Achse 1 und 2. Selbst die aluverstärkte Platte hängt in der Luft. Besonders dort sind die Kugellager extrem effektiv. Um den Roboter aus dieser Position zu bewegen reichen auch 2 Motoren aus, ohne Kugellager geht da selbst mit 4 Motoren nichts. Mit 4 Motoren ist an der Spitze sogar noch 200g anhebbar. In der Position macht eher der Schrittmotor Probleme….
Stefan Falk (22.4.2009, 22:42:34)
Das sieht sehr solide gemacht aus, toll! Ich freu’ mich schon auf den fertigen Robbi.
Gruß, Stefan
Triceratops (24.4.2009, 21:21:51)
Hallo
Bei derart brachialen Drehgelenken solltest du besonders darauf aufpassen, daß die Antriebsschnecke(n) aufgrund der immensen Kräfte nicht den (oder die) Drehkränze “zerfressen”. Ansonsten: gut gelungen!
Gruß, Thomas